如果你想在機器人世界末日中倖存下來,那就關好門吧!儘管機器人在精度、速度、一致性方面表現出色,但它們在操縱門把手等基本任務方面的表現卻依然糟糕。部分問題在於,它們必須在為人類而建、為人類之手而設計的世界中穿行。而這些手堪稱是自然界中最複雜的結構。

不過,比薩大學(University of Pisa)和義大利理工學院(Italian Institute of Technology)的研究人員已經開發出一種極其簡單、但功能驚人的機器人手,名為SoftHand 2,它只用兩個馬達就能支援工作。相比之下,雖然Shadow Dexterous Hand功能更加強大,但它需要20個馬達。SoftHand還承諾,它將幫助機器人以低廉價格佔領市場。
和其他機器人手一樣,SoftHand使用“肌腱”(也就是電纜)來拉手指,但它的排列方式完全不同。SoftHand只使用一根穿過每個手指滑輪的電纜,而不是將一堆電纜連線到每個手指上。雖然新的設計會降低機械手的靈活性,但同時也降低了成本和耗電量。這已經很不多,畢竟還沒有一種技術能製造出適合所有機器人的機械手。更復雜的機器人手無疑會在某些用例中佔有一席之地,比如SoftHand。
為了創造出這隻靈巧而簡單的機器人手,研究人員最初只造了更簡單的SoftHand,它只有一個馬達。幫助開發該系統的機器人專家科西莫·德拉-桑迪納(Cosimo Della Santina)說:“這個想法的靈感是,當你啟動馬達時,肌腱的長度就會收縮,這樣你就會迫使手閉合。”
由於關節有彈性,肌腱和手指再次展開就會成為平坦的手掌。如果你想握住一個球,它的效果很好。但由於手指或多或少是一致運動的,精細操作是不可能的。透過增加一個馬達,SoftHand 2顯著提高了靈巧度。看看下面的圖片。肌腱的每一端(仍然蜿蜒穿過所有的手指)都連線在手腕的兩個馬達之一上。如果你把馬達往同一個方向移動,肌腱就會收縮,你就會看到最上面一行的手勢——A、B、C和D。同樣的動作也適合於原始SoftHand。
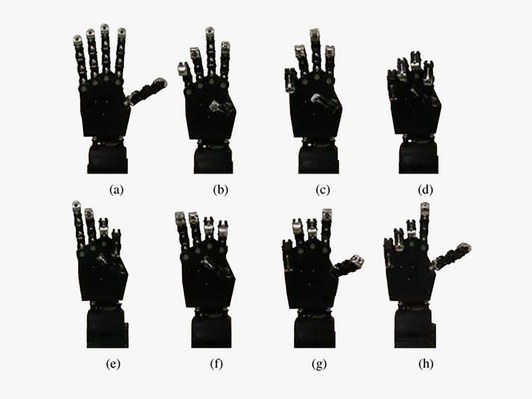
但是把馬達往相反的方向執行,會有更復雜的事情出現,比如E、F、G和H中的場景。在這種情況下,一個馬達放出肌腱,而另一個旋轉肌腱。德拉-桑迪納稱:“如果你的肌腱在很多滑輪中運動,肌腱的張力就不是恆定的。”
如果一個馬達在拉,肌腱末端的拉力會更高。如果另一個馬達在放肌腱,那一端的張力就會降低。透過這種方式利用張力,SoftHand比一般的機械手需要更少的電纜,但仍然可以讓所有的手指擺動。
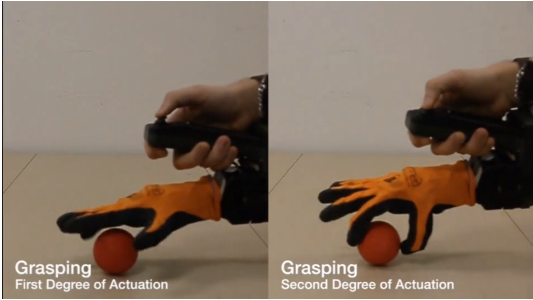
看一看下面的圖,你會發現一個額外的馬達所帶來的不同。左邊有一個馬達,右邊有兩個。前一種蠻力迫使它把所有手指都壓在球上。不過,由於肌腱張力的差異,後者可以更從容地捏住球。
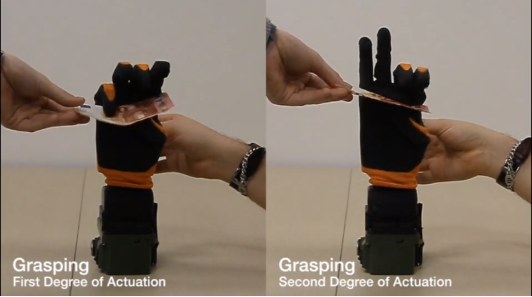
雖然SoftHand只用兩個馬達工作,但它可以完成一系列令人印象深刻的動作。它可以伸出食指去開啟工具箱,或者從桌子上滑下一張紙。它甚至可以擰開一個罐子。所有這些設計意味著它相對便宜,因為更多馬達意味著成本更高。
卡內基梅隆大學研究機器人操作的機器人專家萊雷爾·平託(Lerrel Pinto)說:“要讓機器人學習並做些很酷的事情,我們需要廉價、可靠和複雜的系統。我認為它們的手達到了這種平衡,但真正的測試是其他研究人員是否找到了它的用途。它能用於自主學習嗎?它是可靠的嗎?可以完成數千次抓取?這些問題仍然沒有答案。”
所以SoftHand很有前途,但更復雜的機器人操縱者(如Shadow Dexterous Hand)仍然有很多地方需要改進。SoftHand可能對已經固定的行為很有幫助,比如擰開罐子,而Shadow Dexterous Hand及其許多執行器可能適合於更復雜的任務。