1. 概念
機率:機率模型關心的是一個多維的機率分佈
圖:即圖論的圖,起的作用為一個工具,直觀表達機率之間的聯絡,將機率嵌入圖中,使得模型更加直觀,可以將機率模型的特徵明顯表示出來。
對於多維隨機變數\(p(x_1, \dots, x_p)\), 常用計算為求邊緣機率與條件機率,即有如下運算
- Sum Rule\[p(x_1) = \int_{x_2} \dots \int_{x_p} p(x_1, \dots, x_p) dx_2 \dots dx_p \]
- Product Rule\[p(x_1|x_2) = \frac{p(x_1, x_2)}{p(x_2)} \]
- Chain Rule\[p(x_1, \dots, x_p) = p(x_1) p(x_2|x_1) \dots p(x_p|x_1, \dots, x_{p-1}) \]
- Bayes' Rule\[p(x_1|x_2) = \frac{p(x_2|x_1)p(x_1)}{p(x_2)} = \frac{p(x_2|x_1)p(x_1)}{\int p(x_2|x_1)p(x_1)dx_1} \]
困境:對於多維隨機變數,計算\(p(x_1, \dots, x_p)\)計算量太大,要簡化計算
簡化 1:每個隨機變數之間相互獨立,即有\(p(x_1, \dots, x_p) = \prod_{i=1}^{p} p(x_i)\)
- Naive Bayes 假設所有特徵之間條件獨立,即有\(p(x_1, \dots, x_p|y) = \prod_{i=1}^{p} p(x_i|y)\)
簡化 2(Markov Property):給定當前狀態,未來狀態與過去狀態無關,即有\(p(x_k | x_1, \dots x_{k-1},x_{k+1},\dots, x_{p}) = p(x_k | x_{k-1})\)
- HMM 隱馬爾科夫模型,使用齊次馬爾可夫假設
簡化 3(條件獨立性假設):給定隱變數,觀測變數之間相互獨立,即有\(p(x_1, \dots, x_p|z) = \prod_{i=1}^{p} p(x_i|z)\),是馬爾可夫性質的推廣
- Representation
- 有向圖 Bayesian Network
- 無向圖 Markov Network
- 高斯圖 Gaussian Network(BN MN)
- Inference(給定已知資料,求另外的機率分佈)
- Exact Inference:使用 DP 計算聯合分佈
- Approximate Inference
- 確定性近似(變分推斷)
- 隨機近似 MCMC
- Learning
- Parameter Learning
- 完備資料
- 隱變數
- Structure Learning
- Parameter Learning
2. Bayesian Network(有向圖模型)
使用條件獨立性,將聯合機率分解為多個條件機率的乘積,即有
因子分解
構建圖,使用Topological Order,若有\(X \rightarrow Y\),則有\(p(Y|X)\),那麼從圖上即可以得到聯合機率分佈。
Local Structure
注意,接下來的情況是規律,是從圖與機率的關係得出的。
- tail to tail
若有三個隨機變數\(A, B, C\)滿足 chain rule,即\(p(A,B.C) = p(A) p(B|A) p(C|A,B)\),同時有如下圖
根據圖寫出關係,有\(p(A,B,C) = p(A) p(B|A) p(C|A)\)
則有\(p(C|A,B) = p(C|A)\),其中\(p(C|A,B) = \frac{p(B,C|A)}{P(B|A)}\)
表明\(C\)與\(B\)條件獨立。
- head to tail
\(A\) 與 \(C\) 在 \(B\) 條件下獨立,即\(p(C|A,B) = p(C|B)\)
- head to head
預設情況下,\(A\) 獨立於 \(B\)
若\(C\)被觀測,\(A\) 與 \(B\) 有關係。
可得預設情況下,\(A\) 與 \(B\) 獨立。
Representation: D - Separation
在圖中判斷節點集合的條件獨立性,使用 D-separation 規則。
D-separation 有兩個規則
- 若有節點\(x_b\)作為跨點連線\(A\)與\(C\),並形成 head to tail 或者 tail to tail 結構,那麼\(x_b\) 一定在\(B\)集合中
- 若有節點\(x_b\)作為跨點連線\(A\)與\(C\),並形成 head to head 結構,那麼\(x_b\) 一定不在\(B\)集合中
依次檢測所有跨點,若都滿足,那麼\(A\) 與 \(C\) 條件獨立。
這種判斷規則也叫全域性馬爾可夫性。
Representation: Sample
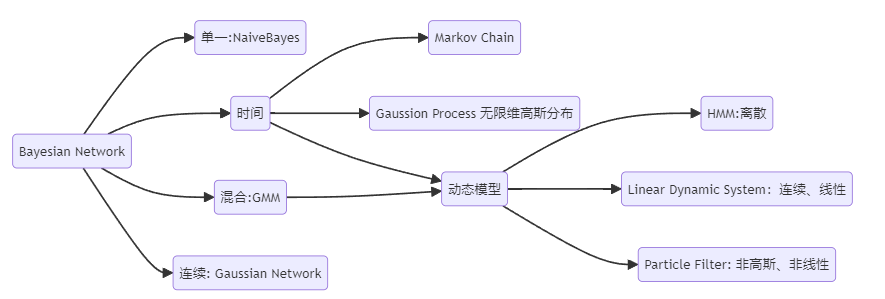
從單一到混合、從有限到無限:
空間:隨機變數的取值從離散到連續
時間:時間序列模型從有限到無限,從某一時刻延長到無限時間
-
Naive Bayes
貝葉斯網路最簡單的模型graph TD y --> x1 y --> x2 y --> x3 -
GMM
graph LR z --> x其中 \(z\) 是離散的,\(x|z \to \mathcal{N}\)
3. Markov Random Field(無向圖模型)
條件獨立性
條件獨立性體現在以下三個方面,且能互相推出:
無向圖的全域性馬爾可夫性:給定兩個隨機變數集合的分離集,兩個隨機變數集合之間條件獨立。
區域性馬爾可夫性:
\(a \perp (全集 - a - \text{neighbour of a}) | \text{neighbour of a}\)
成對馬爾可夫性:
\(x_i \perp x_j | x_{-i-j}\) 其中\(x_i,x_j\)不能相鄰
因子分解
無向圖在因子分解時沒有明確的方向性,因此要有額外的考慮
需要引入概念:
- 團:關於節點的集合,團中的節點形成一個完全圖(所有的節點之間都有邊)
- 極大團:團中不能再加入其他節點形成團(return 極大團是一個 NP-hard 問題)
團分解:將聯合機率分解為多個團的勢函式乘積
所有團的集合記為\(C\), 與團\(c\)對應的變數集合\(x_c\),勢函式\(\psi_c(x_c) \geq 0\)
其中 Z 是歸一化因子,使得機率和為 1,\(Z = \sum_x \prod_{c \in C} \psi_c(x_c)\)
Mark: \(\psi_c(x_c)\)取值隨著 x_c 中的 x 取值改變而改變
接下來的問題時如何構建勢函式,使得因子分解與條件獨立性一致。
然而,當變數個數較多時,團的數量會很多,因此需要簡化,注意到團被極大團包含,因此可以使用極大團來簡化。\(C^*\)為極大團的集合。
Hammesley-Clifford 定理
如果聯合機率分佈能夠使用極大團勢函式表示,那麼由該定理可以證明,因子分解與條件獨立性的三個性質等價。
如何使用因子分解
為了滿足非負性,我們一般定義勢函式(Gibbs Distribution)
那麼此時,聯合機率分佈為
經過一通亂七八糟的說明之後,我們可以得知,Markov Random Field 與 Gibbs Distribution 是等價的。
4. Inference
總體來講,Inference 是指求解已知資料的機率,而求已知資料的機率時需要模型的引數,但是如果將引數看作未知的變數,那麼學習的過程也可以被看作是 Inference 的過程。
Inference 主要分為兩類:
- \(p(x_E)\)
- \(p(x_F | x_E)\), 而 \(p(x_F | x_E)\)又可以被寫作
- MAP: \(\arg \max_{x_F} p(x_F | x_E)\)
實際上 Inference 過程最主要的問題就是求解邊緣分佈的過程。
- 精確推斷
- 動態規劃/變數消除/Variable Elimination
- 信念傳播/Belief Propagation
- Junction Tree
- 近似推斷
- 確定性近似:變分推斷
- 隨機近似:MCMC
Variable Elimination
\(x_5\)的邊緣機率分佈求解為
在這個過程中,如果直接計算,複雜度將會是\(O(|x_1||x_2||x_3||x_4|)\),但是在其中有很多冗餘的計算,因此可以使用動態規劃的思想,將已經計算過的值儲存起來,這樣可以將複雜度降低到\(O(|x_1| + |x_2| + |x_3| + |x_4|)\)。
可以定義中間函式: