PCL: Registration模組之IterativeClosestPoint點雲配準
【原文:http://blog.csdn.net/u012337034/article/details/38307219】
參考文獻:
關於此類的詳細資訊和學術上的理論推導大家可以檢視PaulJ. Besl的文章“A Method forRegistration of 3-D Shapes”。
小結:
ICP匹配,中文應該叫臨近點迭代吧,是計算機圖形學中的一個非常有用的演算法,尤其是在三維重建點雲配準中有著極其重要的地位,此外在SLAM等移動機器人導航等領域也有著很大的用武之地。
經過了十多年的發展ICP也有著很多的變種,今天我們首先熟悉下最基本的ICP匹配演算法,PCL中的實現與參考文獻中的一致,最終的變換矩陣都是基於SVD(奇異值分解)的。
在具體的實踐中,一共有3個約束來終止迭代:
- 迭代次數,預設值為10;
- 上次轉換與當前轉換的差值;
- 前後兩次迭代方差的差值。
當然我們還可以使用kdtree加速演算法。
還有一點需要重點提示下,輸入的點雲需要經過預處理,過於複雜和過多噪聲的點與將會出現“Invalid (NaN, Inf) point coordinates given to nearestKSearch!”的錯誤,比如我使用了官網教程中“樓梯的點雲“。
不同版本的PCL函式命名可能不同,函式個數可能也不一樣。
詳細介紹:
引數輸入輸出:
此類由基類Registration派生,生成物件方式也很簡單,如下:
Pcl:: IterativeClosestPoint<SourcePointTargetPoint> icp
成員函式:
這裡我就不一一介紹所有的成員函式了,只是把幾個非常重要的成員函式給列出來,並給出其的使用方法:
- inline void inline void setSearchMethodTarget(const KdTreePtr &tree) kdtree加速搜尋,還有一個Target的函式,用法與之一致。
- inline void setInputSource (constPointCloudSourceConstPtr &cloud) 需要匹配的點雲。
- inline void setInputTarget (constPointCloudTargetConstPtr &cloud) 基準點雲,也就是從Source到Target的匹配。
- inline void setMaxCorrespondenceDistance (doubledistance_threshold) 忽略在此距離之外的點,如果兩個點雲距離較大,這個值要設的大一些(PCL預設距離單位是m)。
- inline void setTransformationEpsilon (doubleepsilon) 第2個約束,這個值一般設為1e-6或者更小。
- inline void setEuclideanFitnessEpsilon (doubleepsilon) 第3個約束,前後兩次迭代誤差的差值。
- inline void setMaximumIterations (intnr_iterations) 第1個約束,迭代次數,幾十上百都可能出現。
- inline void align (PointCloudSource &output)輸出配準後點雲。
- inline Matrix4 getFinalTransformation () 獲取最終的轉換矩陣。
效果展示:
最近終於把PCL1.7.1搞定了,大家可以參考我的另一篇部落格來安裝,IDE為vs2010。我使用的是經典的史丹佛小兔子,原始碼和源點雲檔案我已上傳到CSDN(點此下載)。所需要的核心程式碼如下(我只是列出了部分需要設定引數的程式碼):
- icp.setInputSource(cloud_source);
- icp.setInputTarget(cloud_target);
- icp.setMaxCorrespondenceDistance(0.1);
- icp.setTransformationEpsilon(1e-6);
- icp.setEuclideanFitnessEpsilon(1);
- icp.setMaximumIterations(50);
- icp.align(*cloud_source_registration);
- Eigen::Matrix4f transformation = icp.getFinalTransformation();

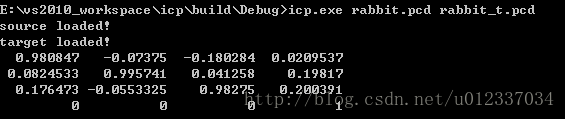
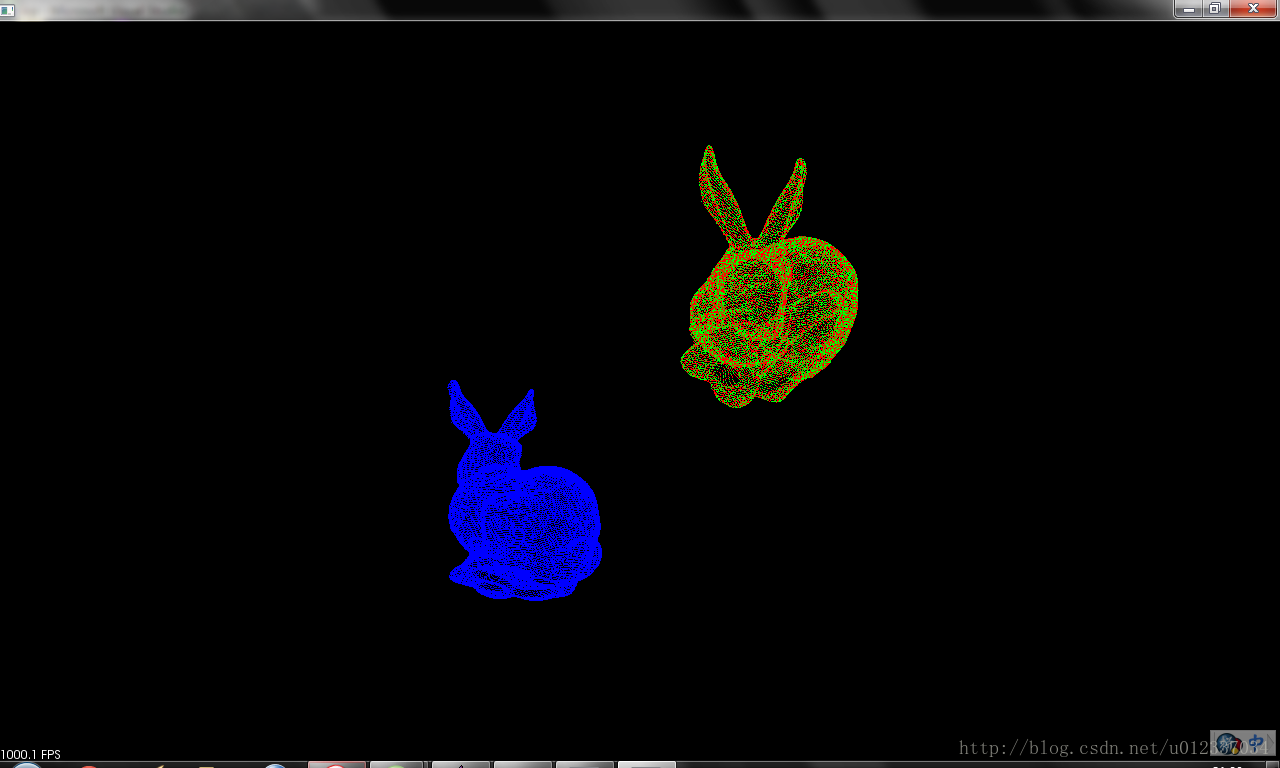
4個引數分別為:1.5,1e-10,0.1,100, 匹配的相當不好。
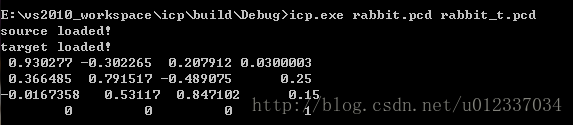
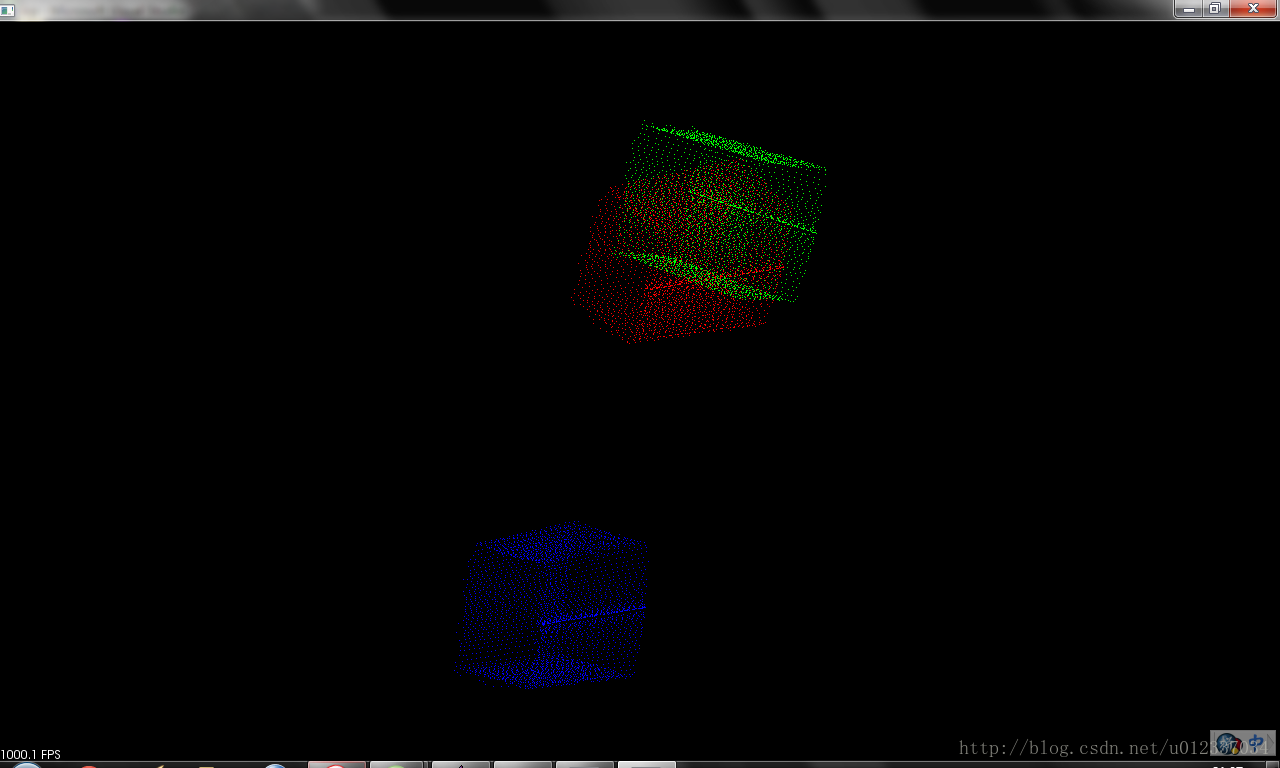
4個引數分別為:1.5,1e-10,0.01,100,完美重合。
下面試一下我自己掃的小盒子。(單位mm,注意引數變化)。
4個引數分別為:1500,1e-10,1,300, 匹配的相當不好。
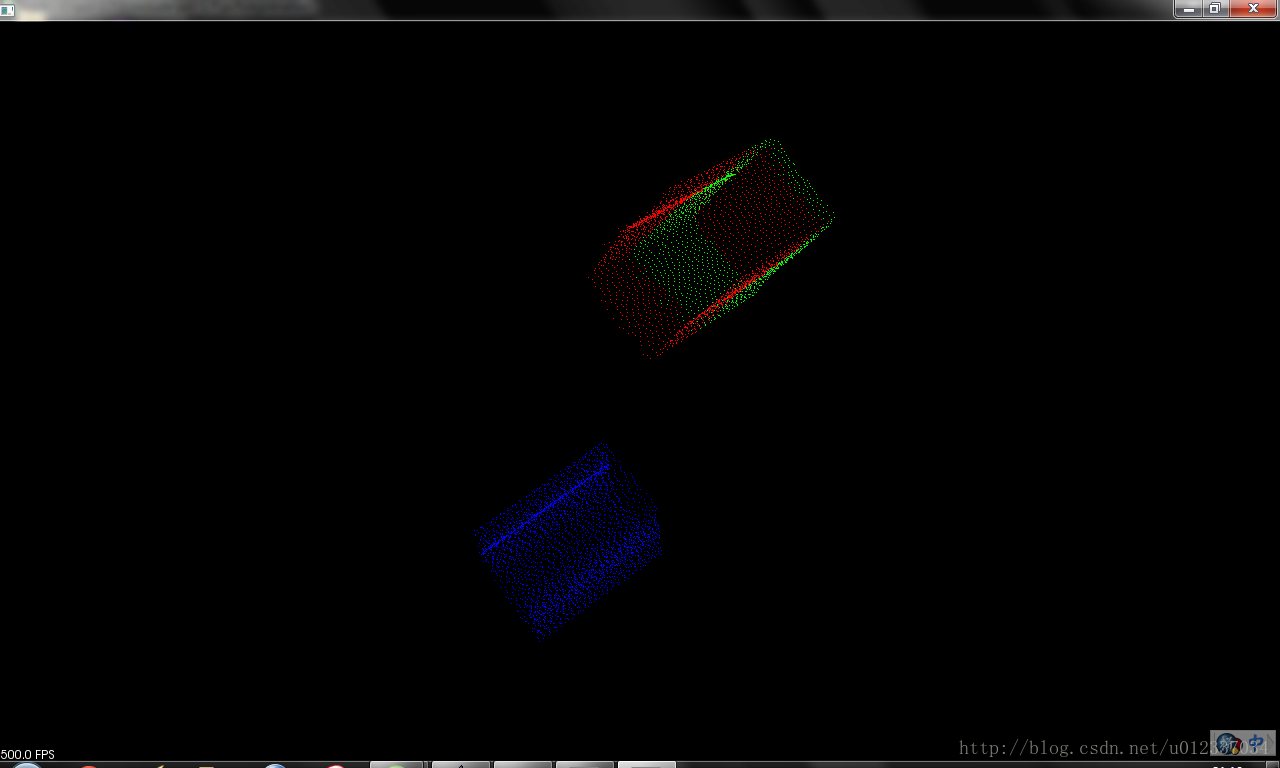
4個引數分別為:1500,1e-10,0.1,300, 完美重合。
強烈建議大家使用CMake進行專案管理和使用最新版的PCL1.7.1。
對了我的郵箱為littletinygo@sina.com,我也是剛剛接觸這個領域,希望與大家多多交流共同學習、共同進步。
相關文章
- 點雲配準基礎
- 【點雲PCL入門】PCL+QT+VTK顯示點雲QT
- 在c++MFC下用PCL顯示操作點雲檔案 MFC對話方塊顯示操作PCL點雲C++
- PCL 計算點雲的面積和體積
- G2O與多視角點雲全域性配準優化優化
- 標準庫之 random 模組random
- PCL之ICP演算法演算法
- ACM Registration systemACM
- pcl::PointCloud和pcl::PontCloud::Ptr之間的關係和轉換方式Cloud
- Python標準庫系列之Memcache模組Python
- Python標準庫系列之Redis模組PythonRedis
- Python標準庫系列之模組介紹Python
- 3Python標準庫系列之os模組Python
- ENVI自動地理配準:GCP地面控制點的自動產生GC
- VBA標準模組與類模組(轉)
- PCL環境配置失敗和執行PCL自帶例子
- matlab練習程式(對應點集配準的四元數法)Matlab
- 模組轉測標準
- STL標準模組庫:容器string模組
- pcl常用小知識
- Android適配: 拉伸適配的缺點Android
- python標準模組(一)Python
- python標準模組(二)Python
- python標準模組(三)Python
- Oracle Data Guard Broker and Static Service Registration (文件 ID 1387859.1)Oracle
- 踩坑記錄:windows11下使用 VS2022 和 PCL1.14.1 配置點雲開發環境Windows開發環境
- python模組之collections模組Python
- ArcGIS API for Silverlight之配準JPG圖片地圖文字傾斜解決方案API地圖
- 鐳射雷達點雲3D模型點雲資料之ply檔案格式3D模型
- 阿里雲windows Server配環境阿里WindowsServer
- Python標準庫(1) — Itertools模組Python
- Vuex之模組Vue
- TypeScript 之模組TypeScript
- 在點雲上計算兩點之間的測地線
- Python模組之urllib模組Python
- 模組學習之hashlib模組
- PCL程式設計-法向量計算程式設計
- PCL常見程式設計問題程式設計