
今日北京時間凌晨,DJI大疆創新在美國紐約舉行新品釋出會,釋出了精靈系列新品――大疆精靈Phantom 4。雖然因為提前曝光對於精靈4並無太多懸念,不過其中的三點創新功能依然表現了大疆的誠意,尤其是其中的視覺避障,可稱得上是黑科技。
目前,市面上主流的電動多旋翼無人機避障系統主要有三種,分別是超聲波、TOF(鐳射雷達測距的一種)以及正有望成為主流的視覺測距。正好最受關注的國內三家無人機廠商最近相繼都推出了自己的新品,並且分別使用到了這三種系統其中一種或兩種。那麼,就來分析下,誰在避障上是真正的黑科技。
零度Xplorer 2:鐳射雷達TOF測距
TOF是Time of flight的簡寫,直譯為飛行時間。所謂飛行時間法3D成像,是透過給目標連續傳送光脈衝,然後用感測器接收從物體返回的光,透過探測光脈衝的飛行(往返)時間來得到目標物距離。
使用這種方式光波容易受到干擾,系統發出的光,必須避開太陽光的主要能量波段,從而避免太陽光的直射、反射等對避障系統造成干擾。該原理需要非常精準的時間測量,需要專用處理晶片,而晶片價格則較為高昂。
零度在CES2016上釋出的Xplorer 2,採用的便是TOF測距方案。無人機上的“蘑菇頭”就是自動避障模組,該避障模組可以實現在6m有效避障距離內,以每秒50次的速率實現360°全方位掃描。

Xplorer 2自動避障模組
昊翔Typhoon H:Realsense(單目+結構光)
Realsense的技術原理是,它採用了“主動立體成像原理”,模仿了人眼的“視差原理”,透過打出一束紅外光,以左紅外感測器和右紅外感測器追蹤這束光的位置,然後用三角定位原理來計算出 3D 影像中的“深度”資訊。透過配有深度感測器和全1080p彩色鏡頭,能夠精確識別手勢動作、面部特徵、前景和背景,進而讓裝置理解人的動作和情感。據Intel方面對外透露的資料,Realsense的有效測距可達10米。
Realsense屬於“單目+結構光”,即單個攝像頭加結構光發射器構成深度攝像頭。不過結構光卻是個“見光死”,“結構光只適合暗環境、室內。為啥intel弄個仿熱帶雨林的暗環境?因為會受到干擾啊!”雷動雲合創始人廖鴻宇說,由於將3D深度攝像頭改為2D深度攝像頭,其“單目+結構光”的智慧導航模組只需200元。

Typhoon H整合了Intel的Realsense模組
大疆精靈Phantom 4:雙目視覺+超聲波
雙目的測距原理,就像我們人類的兩個眼睛,看到的影像不一樣,假如同一個點,兩個眼睛看到兩張影像是存在差異的,而透過三角測距是可以測出這個點的距離。
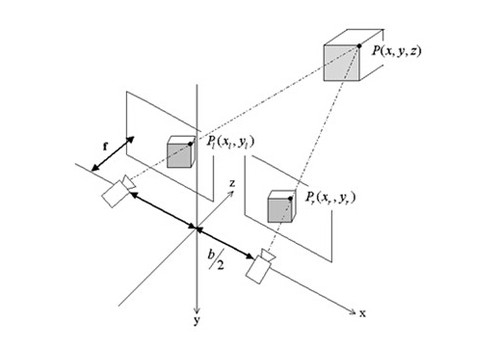
雙目視覺系統原理圖
Phantom 4增加了雙目避障,其實是沿用了guidance的核心演算法,能夠識別最近0.7米,最遠15米的障礙物;水平視角 60°,垂直視角為30°。雙目視覺的優勢體現在,在遠距離,雙目視覺能保證三維精準資訊,比如遠處的兩座山能看出一個近一個遠。當然,遠處的小目標是不可以的。

Phantom 4 下視視覺定位模組
誰的技術才是黑科技?
雷動雲合創始人廖鴻宇:
“其實,所有的光學測距除了TOF以外都是三角測距。雙目測距是基礎,但雙目測距的困難在於,比如兩個攝像頭各拍一張影像,我怎麼知道這兩張影像中的某一點是同一點,這個我們稱為測中點,也叫錨點。這個是計算量很大的工作,後來有人想了一個辦法,我打一個結構光出去,我把一個攝像頭去掉了,結構光那個影像是已知的,也就是說其中一個影像我是明確知道的,那麼另外一個攝像頭拍到的影像呢,就很容易把這個點找出來,然後再計算其中的差異,這樣就可以測距了,這是結構光測距原理。它的運算量會小很多,因為雙目的運算複雜度太大了。不過結構光的前提是需要補光,為什麼叫主動視覺,是因為我們打出了一束光,那為了安全這束光不能太強,如果環境很亮的話,這個光點就很難找,所以結構光一般不適合室外的環境,它適合室內的環境,尤其是越暗的情況下,越容易找到這些點。而雙目視覺呢,是被動視覺,所以外界的光越強影像就越清晰,所以說雙目視覺比較適合室外的環境。
我覺得大疆比較創新的一點是,在室內它的雙目視覺會弱一些的時候,恰好可以使用超聲波,然後在室外雙目視覺運算量太大了,總會有漏掉的部分,這個時候超聲波也可以作為補充。超聲波的特點是用來測距離很準確,但是不能形成各個點之間的深度資訊,它只能測一個大概的距離。舉例來說,車上的雷達都是超聲的,它告訴你某個方向有障礙物,但是它不能告訴你哪個點有障礙物,但是用雙目視覺或結構光我可以測出哪個點的深度資訊。所以,超聲我們一般用來避障,它不適合室內機器人的導航。而無人機在室外主要就是避障,比如只要知道前方有樹就行了。然後在室內,有人用來定高,因為無人機要懸停,而GPS在室內的訊號比較弱。”
圖漾科技的創始人費浙平同樣認同結構光在室外無法使用,而且雙目在觀測物件紋理不明顯的情況下很難有用武之地,不過他的方式不是減少一個攝像頭,而是在兩個攝像頭的基礎上再加上結構光:
“guidance是雙目RGB,看他們網上其中有個說明:‘環境要求照明情況良好;觀測物件紋理明顯’。這是典型的保證雙目RGB方法能夠有效工作的前提,雙目的要求是兩個攝像頭能夠同時定位同一個特徵點,物件特徵紋理不豐富的話,比如一堵白牆,雙目是完全不能用的。所以雙目不能作為通用的深度感測器使用,只能用作預設的特定任務,比如看手型(如leapmotion),避障(如DJI),ADAS(只看有限的前車物體)。雙RGB好處是室外晴天可用(當然在保證攝像頭成像的前提下,不能對著光線過曝),普通結構光在室外完全不行(如kinect和realsense)、室內靠近視窗就已經不行了。結構光就像是投影儀,主動發射設計好的紋理出去打在物體表面。為了不干擾人,用的紅外鐳射,人眼看不到,攝像頭可能看到這些紋理。工業深度相機為了效果好就直接用投影儀投射紋理的,反正不用考慮干擾人眼的問題。”
所以,總結起來就是,在無人機應用上,零度的Xplorer 2因為只有6m有效避障距離失掉先機,大疆的精靈4比昊翔的Typhoon H的室外避障更勝一籌,當然,如果加上結構光是最好的了。