
這種可充氣機器人手臂由RE2 Robotics公司研發。RE2 Robotics公司將這種機器人手臂稱為水下雙機械手系統(Underwater Dual Manipulator system)。與常規拆彈機器人不同的時,這種機器人手臂旨在拆除被固定在船隻、橋樑或碼頭等其他水下結構的簡易爆炸裝置(IED),在理想情況下,這種系統無需海軍潛水員再提供協助。
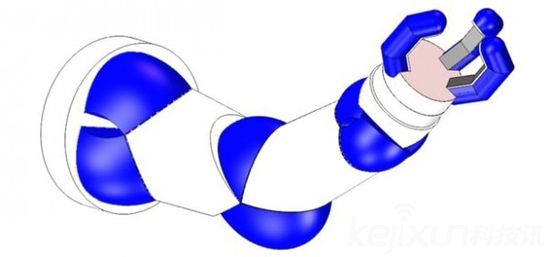
這種機器人內部的零件和外部覆蓋物將由柔性材料製成,並且該裝置將被安裝在現有的海軍無人水下航行器上。
RE2 Robotics公司在2015年10月獲得了美國海軍的合同,從那時起設計出了一個水下高靈敏機械手系統的草圖。現在該公司的工作已經進入第二階段,將涉及構建一個原型,並將其整合到現有的UUV中,並在受控的水下環境中進行測試。

除了炸彈處理,水下雙機械手系統還可以完成水下檢查、維護和修理海上石油鑽井平臺等任務。