
這個研究專案由南大和新加坡民航局(CAAS)聯合設立的空中交通管理研究院(Air Traffic Management Research Institute)主持,將用四年時間研究如何更好的管制無人機,同時充分地利用新加坡的天空。

南大的研究者首先參考陸地交通系統,考慮將天空劃分成一條條“車道”,並且制定相應的交通規則,保證無人機相互之間留有足夠的安全距離。
另外,也需要為無人機設立專用的起飛降落點,“車道”也最好從大樓頂上過,從而避開地面交通,降低安全風險。

考慮到大部分無人機都是旋翼機,可以懸停在半空,這個專案的負責人、南大機械與航空工程系教授Low Kin Huat說,還可以設立虛擬的交通燈,控制各條“車道”的通行。這也是為了更安全有效地對無人機進行管制。
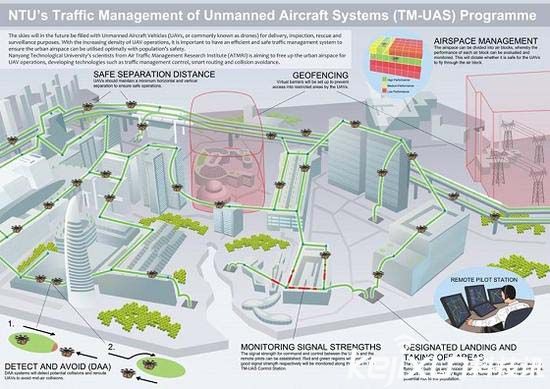
無人機飛行路線上也可以安裝訊號監測裝置,告訴使用者哪些地方無人機訊號好,可以正常操縱;哪些地方訊號差,需要避開,或者讓無人機自主飛行。
對於一些無人機禁止進入的區域,比如樟宜機場、變電站或者其他設施,也可以針對無人機設立虛擬“路障”,從軟體上著手,讓無人機無法進入。

此外,為了避免“碰擦”等交通事故,也可以為無人機安裝類似現在客機的防撞系統,讓無人機能夠自主避開附近的其他無人機。

除了參考陸地交通系統,對於無人機還有另外一種管制方法,就是參考機場的塔臺。可以在新加坡各處建立無人機監視控制站,實時監控空中無人機的數量、方位、速度、高度和航向,防止它們發生碰撞或者飛入“禁區”。