http://www.cnblogs.com/LBSer/p/4417127.html
一、為什麼需要點聚合
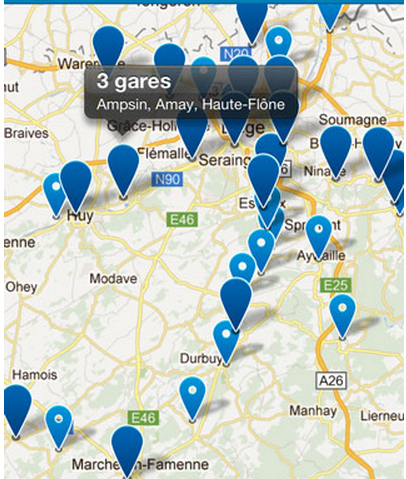
在地圖上查詢結果通常以標記點的形式展現,但是如果標記點較多,不僅會大大增加客戶端的渲染時間,讓客戶端變得很卡,而且會讓人產生密集恐懼症(圖1)。為了解決這一問題,我們需要一種手段能在使用者有限的可視區域範圍內,利用最小的區域展示出最全面的資訊,而又不產生重疊覆蓋。
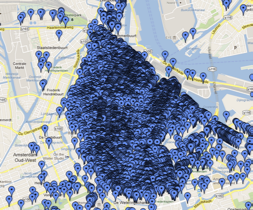
圖1
二、已嘗試的方案---kmeans
直覺上用聚類演算法能較好達成我們目標,因此採用簡單的kmeans聚類。根據客戶端的請求,我們知道了客戶端顯示的範圍,併到索引引擎裡取出在此範圍內的資料,並對這些資料進行kmeans聚類,最後將結果返回給客戶端。
但是上線之後發現kmeans效果並不如意,主要有以下兩個缺點。
a)效能問題
kmeans是計算密集型演算法,需要迭代多次才能完成,而且每次迭代過程中都涉及到複雜的距離計算,比較消耗cpu。
我們在上線後遇到load較高的問題。
b)效果問題
kmeans未能徹底解決重疊覆蓋問題!可以看到有些聚合後的圖示會疊合在一起。

三、優化方案
再次回顧我們的目的:我們需要一種手段能在使用者有限的可視區域範圍內,利用最小的區域展示出最全面的資訊,而又不產生重疊覆蓋。
3.1. 直接網格法
解決地理空間相關問題時,對空間劃分網格這種方法往往屢試不爽。
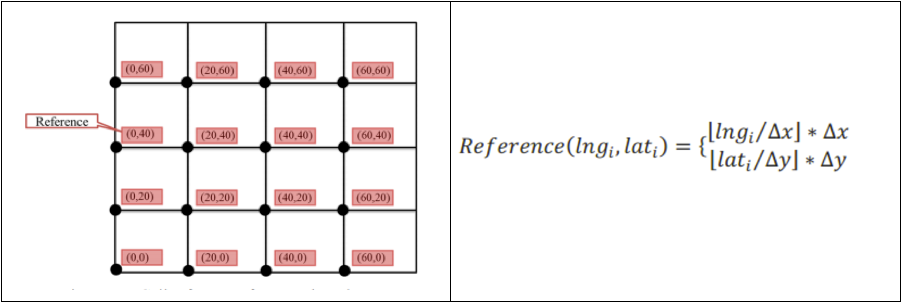
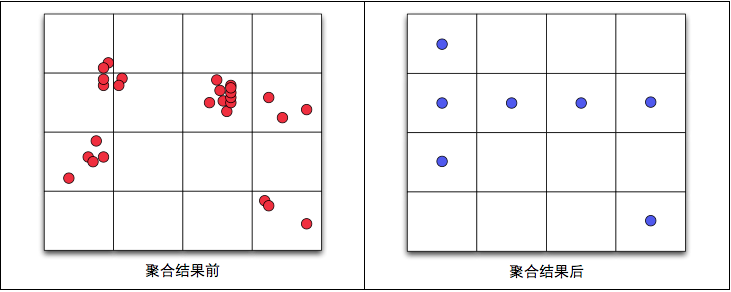
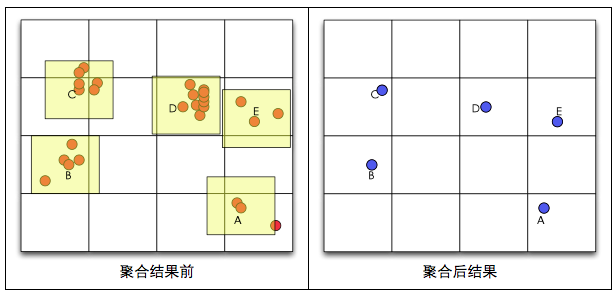
原理:將地圖範圍劃分成指定尺寸的正方形(每個縮放級別不同尺寸),然後將落在對應格子中的點聚合到該正方形中(正方形的中心),最終一個正方形內只顯示一箇中心點,並且點上顯示該聚合點所包含的原始點的數量。
如何將點落到正方形內呢?我們將空間人為指定100*100大小,通過這個公式進行對映。
優點:運算速度較快,每個原始點只需計算一次,沒有複雜的距離計算。
缺點:有時明明很相近的點,卻僅僅因為網路的分界線而被逼分開在不同的聚合點中,此外,聚合點的位置採用的是該網格的中心,而非該網格的質心,這樣聚合出來的點可能不能較精確反映原始點的資訊。
3.2. 網格距離法
原理:沿用方案一思想,1)將各個點落到相應正方形內;2)求解各個網格的質心;3)合併質心:判斷各個質心是否在某一範圍內,如果在某一範圍內則進行合併。
如何判斷各個質心點是否需要合併呢?以A點為例,畫一個矩形或者圓範圍,落在此範圍內的合併,B、C均落在範圍內,因此A、B、C三點合併。
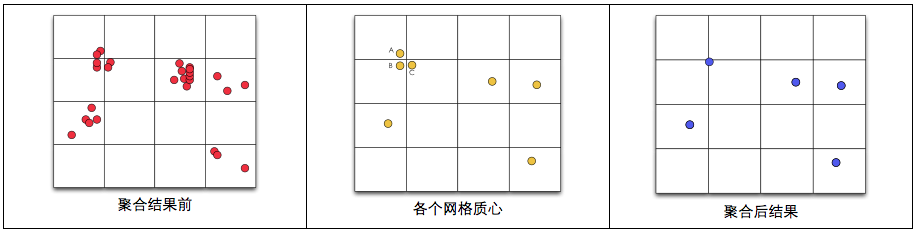
優點:運算速度同樣較快,相對於方案一,多了求解質心以及質心合併兩個步驟,但這兩個步驟都較為簡單,能很快完成。
3.3. 直接距離法
原理:初始時沒有任何已知聚合點,然後對每個點進行迭代,計算一個點的外包正方形,若此點的外包正方形與現有的聚合點的外包正方形不相交,則新建聚合點(這裡不是計算點與點間的距離,而是計算一個點的外包正方形,正方形的變長由使用者指定或程式設定一個預設值),若相交,則把該點聚合到該聚合點中,若點與多個已知的聚合點的外包正方形相交,則計算該點到到聚合點的距離,聚合到距離最近的聚合點中,如此迴圈,直到所有點都遍歷完畢。每個縮放級別都重新遍歷所有原始點要素。
優點:運算速度相對較快,每個原始點只需計算一次,可能會有點與點距離計算,聚合點較精確的反映了所包含的原始點要素的位置資訊。
缺點:速度不如完全基於網格的速度快等,此法還有個缺點,就是各個點迭代順序不同導致最終結果不同。因此涉及到制定迭代順序的問題。
3.4. K-D樹方法
這種方法需要結合PCA(主成分分析)和K-D樹,在效果上比較好,但是效能較差,實現也較為複雜。

(http://applidium.com/en/news/too_many_pins_on_your_map/)
參考文獻
https://developers.google.com/maps/articles/toomanymarkers
http://applidium.com/en/news/too_many_pins_on_your_map/
基於百度地圖的標記點聚合演算法研究