Particle Filter Tutorial 粒子濾波:從推導到應用(一)
前言:
早幾年前寫部落格的時候,編輯公式都是線上網站編輯的,有時候這個網站不穩定,貼的公式看不到。如果有需要,pdf版下載地址點選開啟連結,給您閱讀帶來的不便表示抱歉,祝大家好運。
博主在自主學習粒子濾波的過程中,看了很多文獻或部落格,不知道是看文獻時粗心大意還是悟性太低,看著那麼多公式,總是無法把握住粒子濾波的思路,也無法將理論和實踐對應起來。比如:理論推導過程中那麼多概率公式,概率怎麼和系統的狀態變數對應上了?狀態粒子是怎麼一步步取樣出來的,為什麼程式裡面都是直接用狀態方程來計算?粒子的權重是怎麼來的?經過一段時間的理解,總算理清了它的脈絡。同時也覺得,只有對理論的推導心中有數了,才能知道什麼樣的地方可以用這個演算法,以及這個演算法有什麼不足。因此,本文將結合實際程式給出粒子濾波的詳細推導,在推導過程中加入博主自己的理解,如有不妥,請指出,謝謝。
文章架構:
由最基礎的貝葉斯估計開始介紹,再引出蒙特卡羅取樣,重要性取樣,SIS粒子濾波,重取樣,基本粒子濾波Generic Particle Filter,SIR粒子濾波,這些概念的引進,都是為了解決上一個概念中出現的問題而環環相扣的。最後給出幾個在matlab和python中的應用,例程包括影像跟蹤,濾波,機器人定位。
再往下看之前,也可以看看《卡爾曼濾波:從推導到應用》,好對這種通過狀態方程來濾波的思路有所瞭解。
一、貝葉斯濾波
假設有一個系統,我們知道它的狀態方程,和測量方程如下:
如:
(1)
如:
(2)
其中x為系統狀態,y為測量到的資料,f,h是狀態轉移函式和測量函式,v,n為過程噪聲和測量噪聲,噪聲都是獨立同分布的。上面對應的那個例子將會出現在程式中。
從貝葉斯理論的觀點來看,狀態估計問題(目標跟蹤、訊號濾波)就是根據之前一系列的已有資料(後驗知識)遞推的計算出當前狀態
的可信度。這個可信度就是概率公式
,它需要通過預測和更新兩個步奏來遞推的計算。
預測過程是利用系統模型(狀態方程1)預測狀態的先驗概率密度,也就是通過已有的先驗知識對未來的狀態進行猜測,即p( x(k)|x(k-1) )。更新過程則利用最新的測量值對先驗概率密度進行修正,得到後驗概率密度,也就是對之前的猜測進行修正。
在處理這些問題時,一般都先假設系統的狀態轉移服從一階馬爾科夫模型,即當前時刻的狀態x(k)只與上一個時刻的狀態x(k-1)有關。這是很自然的一種假設,就像小時候玩飛行棋,下一時刻的飛機跳到的位置只由當前時刻的位置和骰子決定。同時,假設k時刻測量到的資料y(k)只與當前的狀態x(k)有關,如上面的狀態方程2。
為了進行遞推,不妨假設已知k-1時刻的概率密度函式
預測:由上一時刻的概率密度得到
,這個公式的含義是既然有了前面1:k-1時刻的測量資料,那就可以預測一下狀態x(k)出現的概率。
計算推導如下:
等式的第一行到第二行純粹是貝葉斯公式的應用。第二行得到第三行是由於一階馬爾科夫過程的假設,狀態x(k)只由x(k-1)決定。
樓主看到這裡的時候想到兩個問題:
第一:既然 ,x(k)都只由x(k-1)決定了,即
,在這裡弄一個
是什麼意思?
這兩個概率公式含義是不一樣的,前一個是純粹根據模型進行預測,x(k)實實在在的由x(k-1)決定,後一個是既然測到的資料和狀態是有關係的,現在已經有了很多測量資料 y 了,那麼我可以根據已有的經驗對你進行預測,只是猜測x(k),而不能決定x(k)。
第二:上面公式的最後一行是假設已知的,但是
怎麼得到呢?
其實它由系統狀態方程決定,它的概率分佈形狀和系統的過程噪聲
形狀一模一樣。如何理解呢?觀察狀態方程(1)式我們知道,x(k) = Constant( x(k-1) ) + v(k-1) 也就是x(k)由一個通過x(k-1)計算出的常數疊加一個噪聲得到。看下面的圖:
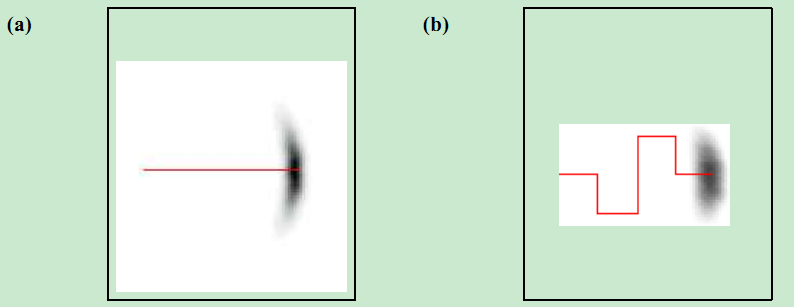
如果沒有噪聲,x(k)完全由x(k-1)計算得到,也就沒由概率分佈這個概念了,由於出現了噪聲,所以x(k)不好確定,他的分佈就如同圖中的陰影部分,實際上形狀和噪聲是一樣的,只是進行了一些平移。理解了這一點,對粒子濾波程式中,狀態x(k)的取樣的計算很有幫助,要取樣x(k),直接取樣一個過程噪聲,再疊加上 f(x(k-1)) 這個常數就行了。
更新:由得到後驗概率
。這個後驗概率才是真正有用的東西,上一步還只是預測,這裡又多了k時刻的測量,對上面的預測再進行修正,就是濾波了。這裡的後驗概率也將是代入到下次的預測,形成遞推。
推導:
其中歸一化常數:
等式第一行到第二行是因為測量方程知道, y(k)只與x(k)有關,也稱之為似然函式,由量測方程決定。也和上面的推理一樣,
, x(k)部分是常數,
也是隻和量測噪聲n(k)的概率分佈有關,注意這個也將為SIR粒子濾波里權重的取樣提供程式設計依據。
貝葉斯濾波到這裡就告一段落了。但是,請注意上面的推導過程中需要用到積分,這對於一般的非線性,非高斯系統,很難得到後驗概率的解析解。為了解決這個問題,就得引進蒙特卡洛取樣。關於它的具體推導請見 下一篇博文。
(轉載請註明作者和出處:http://blog.csdn.net/heyijia0327 未經允許請勿用於商業用途)
reference:
1.M. Sanjeev Arulampalam 《A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking》
2.ZHE CHEN 《Bayesian Filtering: From Kalman Filters to Particle Filters, and Beyond》
3.Sebastian THRUN 《Probabilistic Robotics》
3.百度文庫 《粒子濾波理論》
相關文章
- 粒子濾波(Particle Filter)的通俗解釋Filter
- 詳解卡爾曼濾波(Kalman Filter)原理Filter
- 測試卡爾曼濾波器(Kalman Filter)Filter
- 引導濾波GuidedFilterGUIIDEFilter
- 圖解卡爾曼濾波(Kalman Filter)--理解1圖解Filter
- [PY3]——過濾資料——列表推導、filter()、itertools.compress()Filter
- [SceneKit專題]4-Particle-Systems粒子系統
- 數字濾波器和模擬濾波器(一)
- PCL學習記錄-1 Filter-1 PassThrough filter(直通濾波器)功能及用法解析Filter
- filter過濾Filter
- lambda map filter reduce zip 以及列表推導Filter
- [Python影象處理] 四.影象平滑之均值濾波、方框濾波、高斯濾波及中值濾波Python
- SVG <filter> 濾鏡SVGFilter
- CSS濾鏡(filter)CSSFilter
- Filter過濾器Filter過濾器
- OpenCV計算機視覺學習(4)——影像平滑處理(均值濾波,高斯濾波,中值濾波,雙邊濾波)OpenCV計算機視覺
- 基於粒子濾波和幀差法的目標跟蹤matlab模擬Matlab
- cocos2d-x 3.1.1 學習筆記[16] Particle 粒子效果筆記
- 【OpenCV】鄰域濾波:方框、高斯、中值、雙邊濾波OpenCV
- 卡爾曼濾波
- PHP 過濾器(Filter)PHP過濾器Filter
- Java Filter過濾器JavaFilter過濾器
- lucene Filter過濾器Filter過濾器
- Java Servlet (1) —— Filter過濾請求與響應JavaServletFilter
- Elasticsearch——filter過濾查詢ElasticsearchFilter
- Filter過濾器的使用Filter過濾器
- JavaWeb - 【Filter】敏感詞過濾JavaWebFilter
- JavaWeb 中 Filter過濾器JavaWebFilter過濾器
- 從0到1打造一個 WebRTC 應用Web
- OpenCV 線性濾波OpenCV
- 協同過濾在推薦系統中的應用
- git filter-branch應用GitFilter
- [快速閱讀九] 自適應中值濾波及保守濾波在去除椒鹽噪音或脈衝噪音上的應用。
- 記一個複雜元件(Filter)的從設計到開發元件Filter
- 濾波演算法——十大濾波演算法程式大全演算法
- 點雲濾波器與過濾器過濾器
- FreeBSD上用IP Filter進行橋過濾(轉)Filter
- 從零手寫實現 tomcat-11-filter 過濾器TomcatFilter過濾器