尋路演算法-貪婪最佳優先演算法
最近開始接觸尋路演算法,對此不太瞭解的話建議讀者先看這篇文章《如何快速找到最優路線?深入理解遊戲中尋路演算法》 。
所有尋路演算法都需要一種方法以數學的方式估算某個節點是否應該被選擇。大多數遊戲都會使用啟發式 (heuristic) ,以 h(x) 表示,就是估算從某個位置到目標位置的開銷。理想情況下,啟發式結果越接近真實越好。
——《遊戲程式設計演算法與技巧》
今天主要說的是貪婪最佳優先搜尋(Greedy Best-First Search),貪心演算法的含義是:求解問題時,總是做出在當前來說最好的選擇。通俗點說就是,這是一個“短視”的演算法。
為什麼說是“短視”呢?首先要明白一個概念:曼哈頓距離。
曼哈頓距離
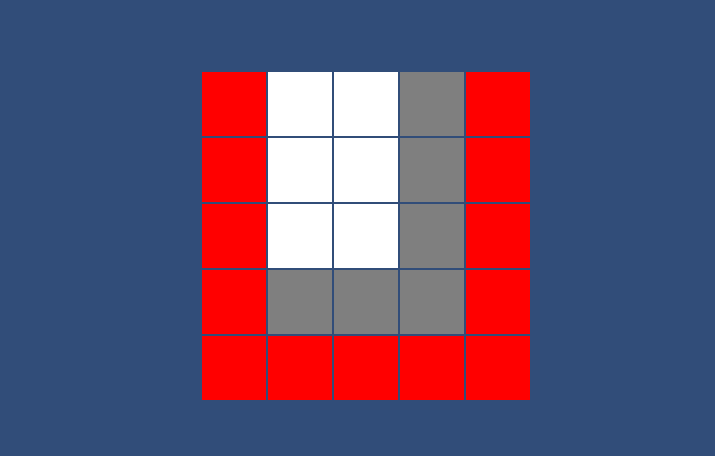
曼哈頓距離被認為不能沿著對角線移動,如下圖中,紅、藍、黃線都代表等距離的曼哈頓距離。綠線代表歐氏距離,如果地圖允許對角線移動的話,曼哈頓距離會經常比歐式距離高。

在 2D 地圖中,曼哈頓距離的計算如下:

貪婪最佳優先搜尋的簡介
貪婪最佳優先搜尋的每一步,都會查詢相鄰的節點,計算它們距離終點的曼哈頓距離,即最低開銷的啟發式。
貪婪最佳優先搜尋在障礙物少的時候足夠的快,但最佳優先搜尋得到的都是次優的路徑。例如下圖,演算法不斷地尋找當前 h(啟發式)最小的值,但這條路徑很明顯不是最優的。
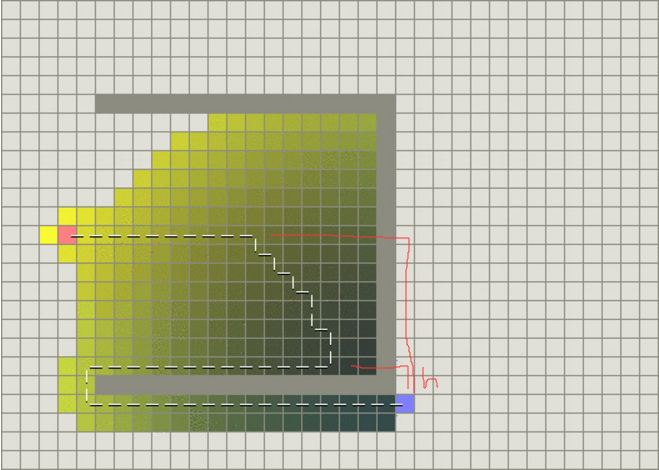
貪婪最佳優先搜尋“未能遠謀”,大多數遊戲都要比貪婪最佳優先演算法所能提供的更好的尋路,但大多數尋路演算法都是基於貪婪演算法,所以瞭解該演算法很有必要。
首先是節點類,每個節點需要儲存上一個節點的引用和 h 值,其他資訊是為了方便演算法的實現。儲存上一個節點的引用是為了像一個連結串列一樣,最後能通過引用得到路徑中所有的節點。
public class Node
{
// 上一個節點
public Node parent;
// 節點的 h(x) 值
public float h;
// 與當前節點相鄰的節點
public List<Node> adjecent = new List<Node>();
// 節點所在的行
public int row;
// 節點所在的列
public int col;
// 清除節點資訊
public void Clear()
{
parent = null;
h = 0.0f;
}
}
下面是圖類,圖類最主要的任務就是根據提供的二維陣列初始化所有的節點,包括尋找他們的相鄰節點。
// 圖類
public class Graph
{
public int rows = 0;
public int cols = 0;
public Node[] nodes;
public Graph(int[, ] grid)
{
rows = grid.GetLength(0);
cols = grid.GetLength(1);
nodes = new Node[grid.Length];
for (int i = 0; i < nodes.Length; i++)
{
Node node = new Node();
node.row = i / cols;
node.col = i - (node.row * cols);
nodes[i] = node;
}
// 找到每一個節點的相鄰節點
foreach (Node node in nodes)
{
int row = node.row;
int col = node.col;
// 牆,即節點不能通過的格子
// 1 為牆,0 為可通過的格子
if (grid[row, col] != 1)
{
// 上方的節點
if (row > 0 && grid[row - 1, col] != 1)
{
node.adjecent.Add(nodes[cols * (row - 1) + col]);
}
// 右邊的節點
if (col < cols - 1 && grid[row, col + 1] != 1)
{
node.adjecent.Add(nodes[cols * row + col + 1]);
}
// 下方的節點
if (row < rows - 1 && grid[row + 1, col] != 1)
{
node.adjecent.Add(nodes[cols * (row + 1) + col]);
}
// 左邊的節點
if (col > 0 && grid[row, col - 1] != 1)
{
node.adjecent.Add(nodes[cols * row + col - 1]);
}
}
}
}
}
在演算法類中,我們需要記錄開放集合和封閉集合。開放集合指的是當前步驟我們需要考慮的節點,例如演算法開始時就要考慮初始節點的相鄰節點,並從其找到最低的 h(x) 值開銷的節點。封閉集合存放已經計算過的節點。
// 開放集合
public List<Node> reachable;
// 封閉集合,存放已經被演算法估值的節點
public List<Node> explored;
下面是演算法主要的邏輯,額外的函式可以檢視專案原始碼。
public Stack<Node> Finding()
{
// 存放查詢路徑的棧
Stack<Node> path;
Node currentNode = reachable[0];
// 迭代查詢,直至找到終點節點
while (currentNode != destination)
{
explored.Add(currentNode);
reachable.Remove(currentNode);
// 將當前節點的相鄰節點加入開放集合
AddAjacent(currentNode);
// 查詢了相鄰節點後依然沒有可以考慮的節點,查詢失敗。
if (reachable.Count == 0)
{
return null;
}
// 將開放集合中h值最小的節點當做當前節點
currentNode = FindLowestH();
}
// 查詢成功,則根據節點parent找到查詢到的路徑
path = new Stack<Node>();
Node node = destination;
// 先將終點壓入棧,再迭代地把node的前一個節點壓入棧
path.Push(node);
while (node.parent != null)
{
path.Push(node.parent);
node = node.parent;
}
return path;
}
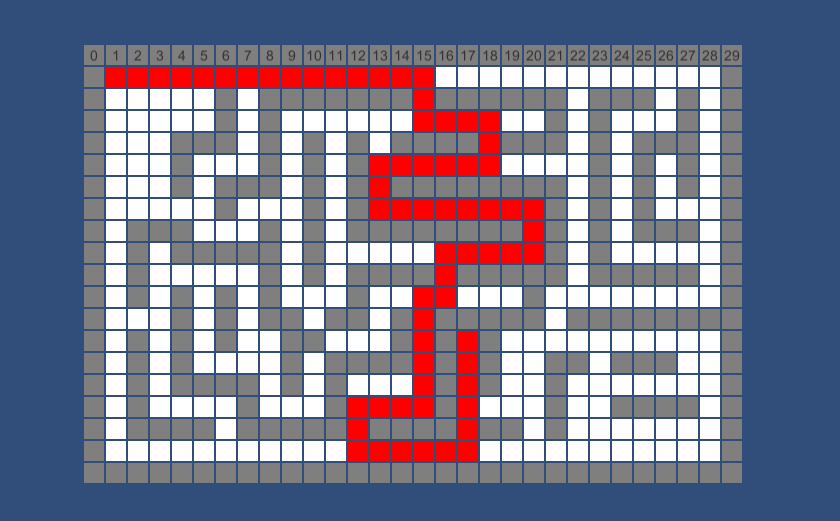
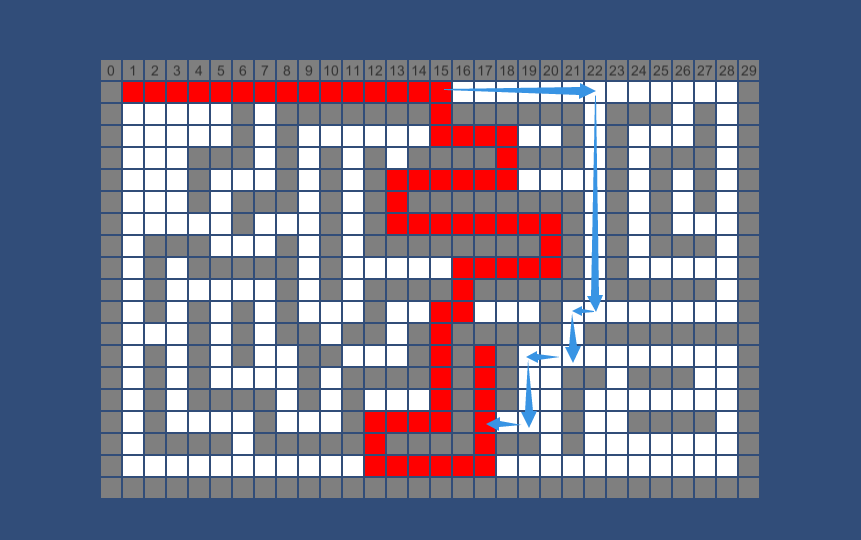
除此以外還有些展示演算法的類,程式碼不在這裡展出。下面是演算法執行的截圖,其中白色格子為可走的格子,灰色格子是不可穿越的,紅色格子為查詢到的路徑,左上角格子為查詢起點,右上角格子為查詢終點。
後一個例項也展現了其"短視"的缺點,紅線走了共65個格子,但藍箭頭方向只走了45個格子。
最後
還有一種方案就是直接計算起點到終點的路徑,這樣可以節省一點計算開銷。如下方右圖,左圖為廣度優先演算法。
本專案原始碼在Github-PathFindingDemo。
瞭解了貪婪最佳優先演算法後,下一篇文章會在本文基礎上講A* 尋路。
參考
- 如何快速找到最優路線?深入理解遊戲中尋路演算法
- 關於尋路演算法的一些思考(1):A*演算法介紹
- 《遊戲程式設計演算法與技巧》
相關文章
- 貪心演算法(貪婪演算法,greedy algorithm)演算法Go
- 貪婪演算法回顧演算法
- 演算法(六):圖解貪婪演算法演算法圖解
- 廣度優先演算法查詢路線演算法
- Python 中的貪婪排名演算法Python演算法
- 演算法面試(七) 廣度和深度優先演算法演算法面試
- “裝箱”問題的貪婪法解決演算法演算法
- “馬的遍歷”問題的貪婪法解決演算法演算法
- (BFS廣度優先演算法) 油田問題演算法
- 正規表示式:貪婪模式與非貪婪模式模式
- 正規表示式貪婪模式與非貪婪模式模式
- 【正規表示式系列】貪婪與非貪婪模式模式
- “人民幣找零”問題的貪婪法解決演算法演算法
- 一種高效的尋路演算法 - B*尋路演算法演算法
- 尋路之 A* 搜尋演算法演算法
- 演算法修養--A*尋路演算法演算法
- 淺談網路爬蟲中深度優先演算法和簡單程式碼實現爬蟲演算法
- 編譯原理上機作業3——算符優先演算法編譯原理演算法
- 尋路演算法之A*演算法詳解演算法
- 貪心演算法演算法
- 正規表示式 貪婪模式模式
- 常用演算法之貪心演算法演算法
- 馬踏棋盤之貪心演算法優化演算法優化
- 【演算法】深度優先搜尋(DFS)演算法
- 演算法(三):圖解廣度優先搜尋演算法演算法圖解
- 啟發式搜尋的方式(深度優先,廣度優先)和 搜尋方法(Dijkstra‘s演算法,代價一致搜尋,貪心搜尋 ,A星搜尋)演算法
- 關於尋路演算法的一些思考(11):尋路演算法的其他應用演算法
- 學一下貪心演算法-學一下貪心演算法演算法
- kmp字串匹配,A星尋路演算法KMP字串匹配演算法
- A*尋路演算法詳細解讀演算法
- 地鐵圖快速尋路演算法演算法
- 貪心演算法Dijkstra演算法
- 9-貪心演算法演算法
- 一個C語言寫的磁碟排程演算法-----SSTF(最短尋道優先演算法),還不是很理解,希望哪位大神能給解釋一下!!!!C語言演算法
- 不怕微軟貪婪 XP登錄檔與驅動程式最佳化全集(轉)微軟
- 演算法---貪心演算法和動態規劃演算法動態規劃
- 資料結構與演算法——貪心演算法資料結構演算法
- 從零到一:用深度優先演算法檢測有向圖的環路(應用場景:性格測試)演算法