《Python 原始碼剖析》一些理解以及勘誤筆記(3)
以下是本人閱讀此書時理解的一些筆記,包含一些影響文義的筆誤修正,當然不一定正確,貼出來一起討論。
注:此書剖析的原始碼是2.5版本,在python.org 可以找到原始碼。紙質書閱讀,pdf 貼圖。
文章篇幅太長,故切分成3部分,這是第三部分。
p316: 初始化執行緒環境
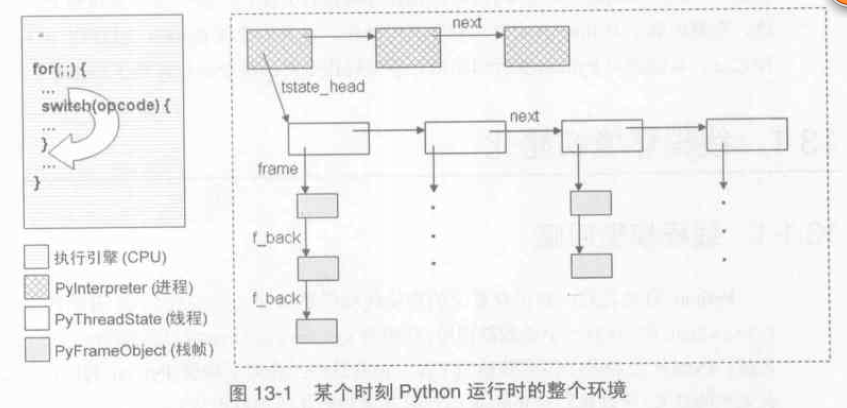
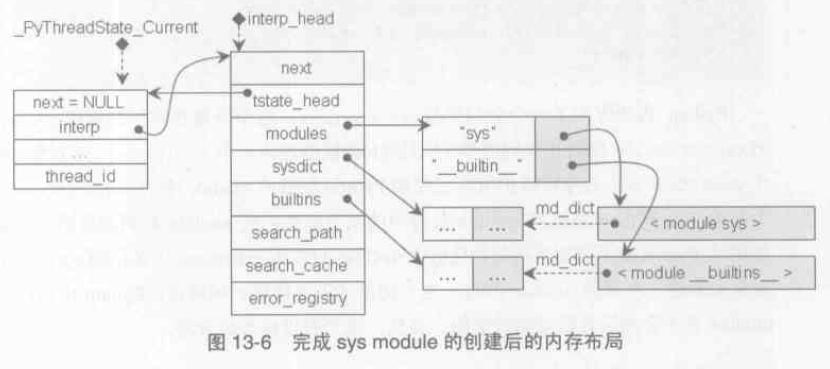
Python 虛擬機器執行期間某個時刻整個的執行環境如下圖:
建立聯絡之後的PyThreadState 物件和 PyInterpreterState 物件的關係如下圖:
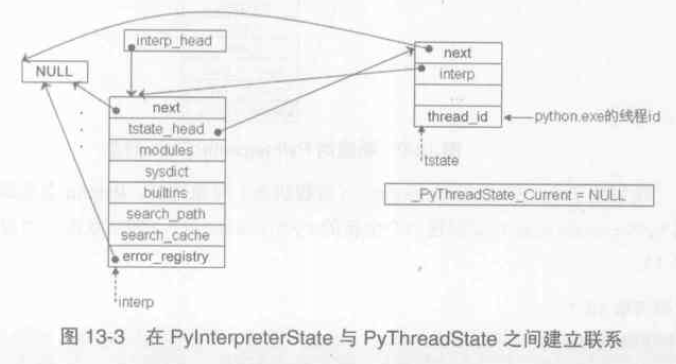
_PyThreadState_Current 是個全域性變數,是當前活動執行緒對應的 PyThreadState 物件;
interp->modules 指向一個 PyDictObject 物件(module_name, module_object),維護系統所有的module,可能動態新增,為所有PyThreadState 物件所共享;import sys sys.modules or sys.__dict__['modules'] 可以訪問到module 集合。同理 interp->builtins 指向 __builtins__.__dict__; interp->sysdict 指向 sys.__dict__;
p320: 系統module 的初始化
在 Python 中,module 通過 PyModuleObject 物件來實現。
|
1
2 3 4 |
typedef struct {
PyObject_HEAD PyObject *md_dict; } PyModuleObject; |
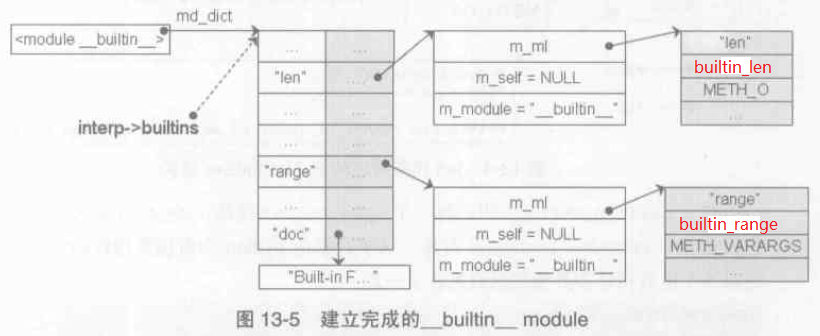
在初始化 __builtin__ 模組時,需要將Python 的內建型別物件塞到 md_dict 中,此外內建函式也需要新增。
如 __builtins__.__dict__['int'] 顯示為 <type 'int'>; __builtins__.__dict__['dir] 顯示為<built-in function dir>;
系統的 __builtin__ 模組的 name為 '__builtin__ ', 即 __builtins__.__dict__['__name__'] 顯示為 '__builtin__ ';
__builtins__.__dict__['__doc__'] 顯示為 "Built-in functions, exceptions, .... ";
也可直接 __builtins__.__name__ , __builtins__.__doc__;
這裡解釋下為什麼會出現 '__builtins__'。我們經常做單元測試使用的機制 if __name__ == '__main__' ,表明作為主程式執行的Python 原始檔可以被視為名為 __main__ 的 module,當然以 import py 方式載入,則__name__ 不會為 __main__。在初始化 __main__ module 時會將('__builtins__', __builtin__ module)插入到其 dict 中。也就是說'__builtins__' 是 dict 中的一個 key。比如在命令列下輸入 dir() ,輸出為 ['__builtins__', '__doc__', '__name__ ']。實際上在啟用位元組碼虛擬機器的過程中建立的第一個PyFrameObject 物件,所設定的 local、global、builtin 名字空間都是從__main__ 模組的dict 中得到的,當然在真正開始執行指令時,local or global 會動態增刪。
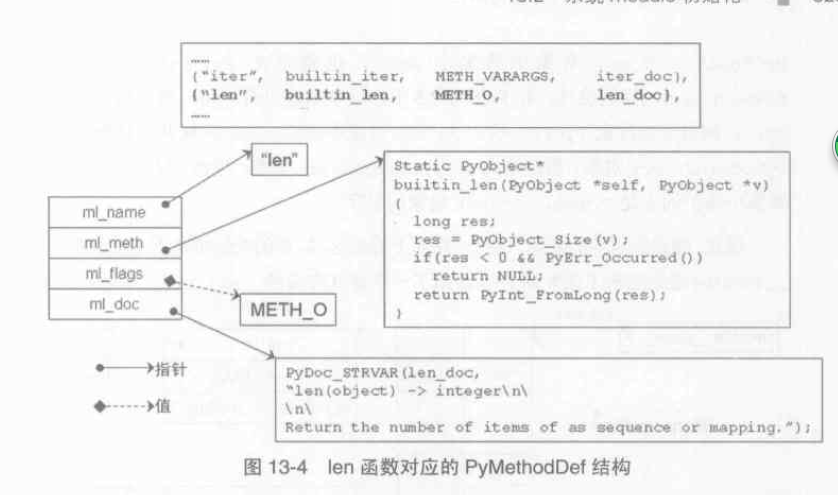
builtin_methods 中每一個函式對應一個 PyMethodDef 結構,會基於它建立一個 PyCFunctionObject 物件,這個物件是Python 對函式指標的包裝。
|
1
2 3 4 5 6 7 |
struct PyMethodDef {
const char *ml_name; /* The name of the built-in function/method */ PyCFunction ml_meth; /* The C function that implements it */ int ml_flags; /* Combination of METH_xxx flags, which mostly describe the args expected by the C func */ const char *ml_doc; /* The __doc__ attribute, or NULL */ }; |
|
1
2 3 4 5 6 |
typedef struct {
PyObject_HEAD PyMethodDef *m_ml; /* Description of the C function to call */ PyObject *m_self; /* Passed as 'self' arg to the C func, can be NULL */ PyObject *m_module; /* The __module__ attribute, can be anything */ } PyCFunctionObject; |
__builtin__ module 初始化完成後如下圖:
在完成了__builtin__ 和 sys 兩個模組的設定之後,記憶體佈局如下圖:
Python 內部維護了一個全部變數extensions,這個PyDictObject 物件將維護所有已經被Python 載入的module 中的
PyDictObject 的一個備份。當Python 系統的 module 集合中的某個標準擴充套件module 被刪除後不久又被重新載入時,Python 就不需要再次初始化這些module,只需要用extensions 中備份的 PyDictObject 物件來建立一個新的module 即可。這一切基於假設:Python 中的標準擴充套件module 是不會在執行時動態改變的。實際上Python 內部提供的module 可以分成兩類,一類是C 實現的builtin module 如thread,一類是用python 實現的標準庫module。
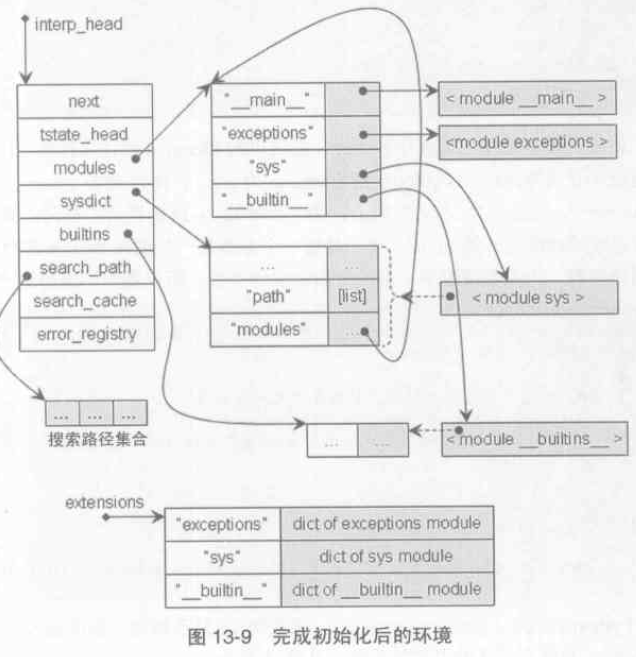
p328:設定搜尋路徑、site-specific 的 module 搜尋路徑
sys.path 即 sys.__dict__['path'] 是一個 PyListObject 物件,包含了一組PyStringObject 物件,每一個物件是一個module 的搜尋路徑。
第三方庫路徑的新增是 lib/site.py 完成的,在site.py 中完成兩個動作:
1. 將 site-packages 路徑加入到 sys.path 中。
2. 處理 site-packages 目錄下所有.pth 檔案中儲存的所有路徑加入到 sys.path。
完成初始化後的環境如下圖所示:
p347: import 機制的黑盒探測
|
1
2 3 |
# hello.py
a = 1 b = 2 |

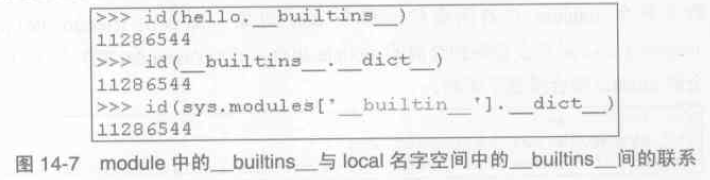
也就是說,hello module 中的 __builtins__ 符號對應的 dict 正是當前名字空間中 __builtins__ 符號對應的module物件所維護的那個dict 物件。
注意 from hello import a 的情況有所不同:
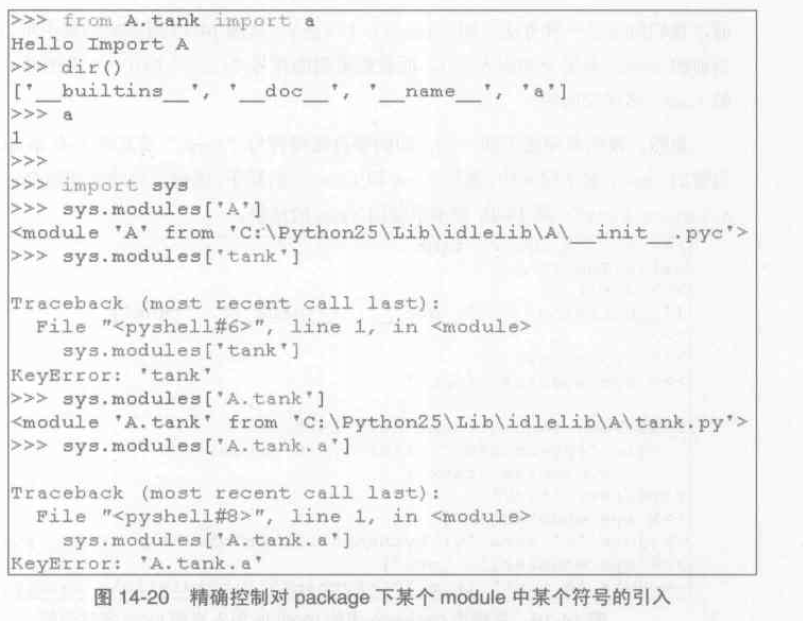
注意 from hello import * ,如果 hello.py 定義了__all__ = [ ... ],那麼只載入列表裡面的符號;當然如果在 __init__.py 定義了 __all__,那麼只載入列表中的 module。類似地,import A.tank as Tank 在locals() 中出現的名字是 'Tank',但還是需要通過 sys.modules['A.tank'] 才能正確訪問。
注意:不要從其他模組 import 初始值為None, 而後值一直被修改的符號,此時應該使用函式等方式來傳遞此符號。因為當前模組中此符號所引用的值可能一直都是None,這取決於初始化順序。
如果出現了巢狀import 的情況呢?
|
1
2 3 4 5 |
# usermodule1.py
import usermodule2 # usermodule2.py import sys |
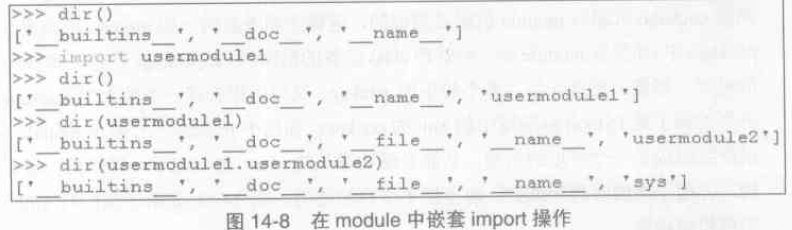
也就是說在每個py 中進行的import 動作並不會影響上一層的名字空間,只是影響各個module 自身的名字空間;但所有import 動作,無論發生在什麼時間、什麼地點,都會影響到全域性module 集合即 sys.modules。圖中的 __file__ 是檔案路徑名。
注意:儘量避免相互引用,這是模組化開發的一條準則。
實際上“動態載入”真實含義是將這個module 以某個符號的形式引入到某個名字空間,del xxx 只是刪除了符號,而sys.modules 中仍然維護了xxx 對應的module 物件。如果我們更新了module A 的某個功能實現,可以使用 reload 來更新 sys.modules 中維護的module A 物件,注意:Python 虛擬機器在呼叫reload() 操作更新module 時,只是將新的符號加入到module 中,而不管module 中的先前符號是否已經在原始檔中被刪除了。
只有在資料夾中有一個特殊的 __init__.py 檔案,Python 虛擬機器才會認為這是一個合法的package,當Python 虛擬機器執行 import A 時,會動態載入目錄A 的 __init__.py,除非 __init__.py 中有顯式的import 語句,否則只會將package 自身載入到Python,並不會對package 中的module 進行任何動作。
在載入package 下的module 時,比如 A.B.C(多層路徑),Python 內部將這個module 的表示視為一個樹狀的結構。如果 A 在import A.D 時被載入了,那麼在 A 對應的PyModuleObject 物件中的dict 中維護著一個 __path__,表示這個 package 的搜尋路徑,那麼接下來對B 的搜尋將只在 A.__path__ 中進行,而不在所有Python 搜尋路徑中執行了(直接 import module 時)。
p362: import 機制的實現
|
1
2 3 4 5 6 7 |
import sys
import xml.sax # xml/sax.py from xml import sax from xml.sax import xmlreader from sys import path from sys import path as mypath import usermodule |
如上舉例說明 " from A import mod",儘管 mod 並不在 A 對應的module 物件的名字空間中,但是import 機制能夠根據 A 發現 mod,也是合法的。
Python import 機制的起點是builtin module 的 __import__ 操作,也就是 builtin__import__ 函式。
Python 將尋找一切可以作為module的檔案,比如subname 來說,Python 將尋找 subname.py、subname.pyc、subname.pyd、subname.pyo、subname.dll(Python 2.5 已不再執行dll 字尾名的檔案)。
對於py 檔案,Python 虛擬機器會先對py 檔案進行編譯產生PyCodeObject 物件,然後執行了co_code 位元組碼,即通過執行def、class 等語句建立PyFunctionObject、PyClassObject 等物件,最後得到一個從符號對映到物件的dict,自然也就是所建立的module 物件中維護的那個dict。
import 建立的module 都會被放到全域性module 集合 sys.module 中。
p386: 與 module 有關的名字空間問題
|
1
2 3 4 5 6 7 8 9 10 11 |
# module1.py
import module2 owner = "module1" module2.show_owner() # "module2" # module2.py owner = "module2" def show_owner(): print owner |
在執行 import module2 時,Python 會建立一個新的PyFrameObject 物件,剛開始這個物件中的global 名字空間可能只有 '__builtins__'
、'__doc__'、'__name__' 等符號,隨著程式碼的執行,global名字空間會增加 'owner' 和'show_owner',並且'show_owner' 對應的PyFunctionObject 對
象中的 func_globals 儲存了當前 global名字空間的所有符號。在 module1.py 中執行完 owner = "module1" 後, module1的global 名字空間大概是
{..., 'owner' : 'module1', 'module2': <module 'module2...'>},在執行 module2.show_owner() 時,首先要獲得符號'show_owner' :
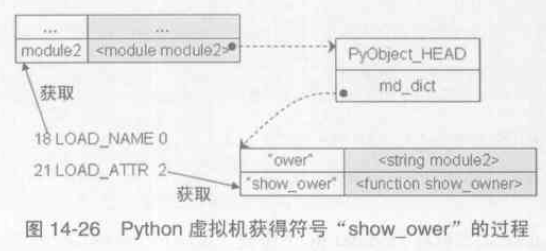
執行函式需要建立一個PyFrameObject 物件,根據筆記(1)的條目p226所說,PyFrame_New(tstate, co, globals, NULL) 中的
global 引數是來自 PyFunctionObject.func_globals,故根據LEGB原則,print owner 輸出的是'module2' 。
p392: Python 的執行緒在GIL(global interpreter lock) 的控制之下,執行緒之間,對整個Python 直譯器(虛擬機器),對Python 提供的 C API 的訪問,都是互斥的,這可以看作是 Python 核心級的互斥機制。Python 內部維護一個數值N(sys.getcheckinterval() ),模擬內部的“軟體中斷”,當執行了某個執行緒的N 條指令之後應該立刻啟動執行緒排程機制,因為 Python 中的執行緒實際上就是作業系統所支援的原生執行緒,故下一個被排程執行的執行緒由作業系統來選擇。
p394: Python 執行緒的建立
threadmodule.c 提供的函式介面很少,定義在 static PyMethodDef thread_methods[] = { ...};
Python 虛擬機器通過三個主要的動作,完成一個執行緒的建立:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 |
//threadmodule.c
// thread.start_new_thread 對應的 c 實現函式 static PyObject * thread_PyThread_start_new_thread(PyObject *self, PyObject *fargs) { ... boot = PyMem_NEW(struct bootstate, 1); // 1) ... PyEval_InitThreads(); /* Start the interpreter's thread-awareness */ // 2) ... ident = PyThread_start_new_thread(t_bootstrap, (void *) boot); // 3) ... return indent; } |
1). 建立並初始化bootstate 結構,儲存執行緒的函式、函式引數等。
|
1
2 3 4 5 6 7 |
struct bootstate
{ PyInterpreterState *interp; PyObject *func; PyObject *args; PyObject *keyw; }; |
2). 初始化Python 的多執行緒環境。
當Python 啟動時是不支援多執行緒的(執行緒的排程需要代價),一旦使用者呼叫 thread.start_new_thread,Python 意識到使用者需要多執行緒的支援,自動建立多執行緒機制需要的資料結構、環境以及重要的GIL 等。
|
1
2 3 4 5 6 |
// pythread.h
typedef void *PyThread_type_lock; // ceval.c static PyThread_type_lock interpreter_lock = 0; /* This is the GIL */ static long main_thread = 0; |
如上定義可以看到實際上 GIL 就是一個 void* 指標,無論建立多少個執行緒,初始化只進行一次。
Python 多執行緒機制具有平臺相關性,在Python/Python 目錄下有一批 thread_***.h 的標頭檔案,包裝了不同作業系統的原生執行緒,並通過統一的介面暴露給 Python,比如thread_nt.h 包裝的是win32 平臺的原生 thread,interpreter_lock 就是指向瞭如下的 NRMUTEX 結構。
|
1
2 3 4 5 6 7 |
//thread_nt.h
typedef struct NRMUTEX { LONG owned ; DWORD thread_id ; HANDLE hevent ; } NRMUTEX, *PNRMUTEX ; |
當初始化環境完畢之後主執行緒(執行python.exe 時作業系統建立的執行緒)首先獲得 GIL 控制權。
3). 以bootstate 為引數建立作業系統的原生執行緒。
在 PyThread_start_new_thread 中首先將t_bootstrap 和 boot 打包到一個型別為 callobj 的結構體obj 中,如下所示:
|
1
2 3 4 5 6 7 8 9 10 11 |
long PyThread_start_new_thread(void (*func)(void *), void *arg)
{ callobj obj; obj.done = CreateSemaphore(NULL, 0, 1, NULL); ... rv = _beginthread(bootstrap, _pythread_stacksize, &obj); /* wait for thread to initialize, so we can get its id */ WaitForSingleObject(obj.done, INFINITE); // 掛起 return obj.id; } |
|
1
2 3 4 5 6 |
typedef struct {
void (*func)(void*); void *arg; long id; HANDLE done; } callobj; |
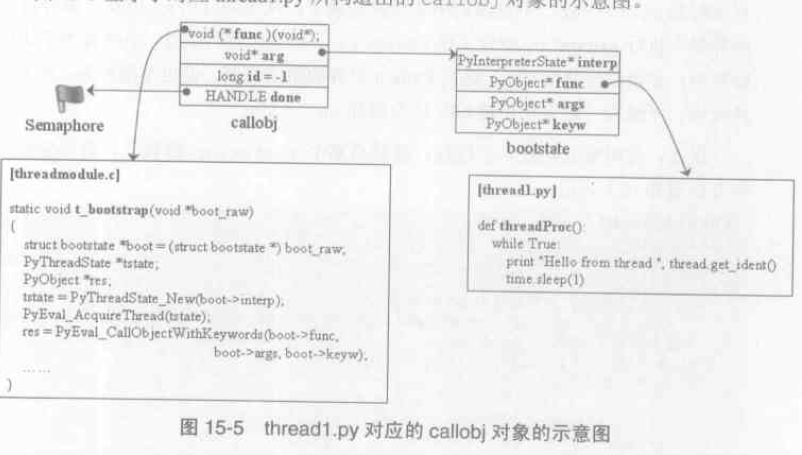
當完成打包之後,呼叫 win32 下建立thread的api:_beginthread 來完成執行緒的建立,函式返回後主執行緒會掛起等待obj.done 這個Semaphore核心物件,子執行緒開始執行bootstrap ,在其中完成3個動作:1). 獲取執行緒id; 2). 通知obj.done 核心物件; 3). 呼叫 t_bootstrap;
|
1
2 3 4 5 6 7 8 9 10 11 12 |
static int bootstrap(void *call)
{ callobj *obj = (callobj*)call; /* copy callobj since other thread might free it before we're done */ void (*func)(void*) = obj->func; void *arg = obj->arg; obj->id = PyThread_get_thread_ident(); ReleaseSemaphore(obj->done, 1, NULL); func(arg); return 0; } |
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
static void t_bootstrap(void *boot_raw)
{ struct bootstate *boot = (struct bootstate *) boot_raw; PyThreadState *tstate; PyObject *res; tstate = PyThreadState_New(boot->interp); PyEval_AcquireThread(tstate); // 申請GIL res = PyEval_CallObjectWithKeywords( boot->func, boot->args, boot->keyw); // 最終呼叫 PyEval_EvalFrameEx ... PyMem_DEL(boot_raw); PyThreadState_Clear(tstate); PyThreadState_DeleteCurrent(); // 釋放 GIL PyThread_exit_thread(); } |
可以認為到此時子執行緒的初始化才算真正完成,子執行緒和主執行緒一樣,都完全被Python 執行緒排程機制所控制了。需要注意的是:當所有執行緒都完成了初始化之後,作業系統的執行緒排程是與Python 的執行緒排程統一的(Python 執行緒排程--> GIL --> Event 核心物件 --> 作業系統排程),但在初始化完成之前,它們之間並沒有因果關係。
我們知道作業系統在進行程式切換時需要儲存or 恢復上下文環境,Python 在進行執行緒切換時也需要將執行緒狀態儲存在 PyThreadState 物件,前面說過,_PyThreadState_Current 這個全域性變數一直指向當前被啟用的執行緒對應的 PyThreadState 物件。Python 內部維護了一個單向連結串列來管理所有Python 執行緒的狀態物件,對於這個連結串列的訪問有一個獨立的鎖而不必在GIL 保護下進行,此鎖的建立在Python 進行初始化時完成。
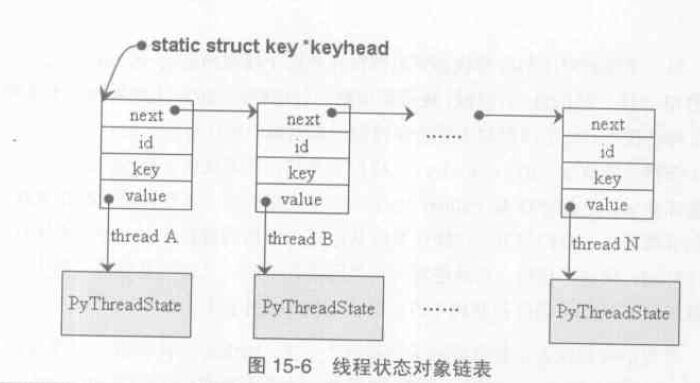
其中 id 是指執行緒id,如果value 都是指向 PyThreadState 物件,那麼它們的 key 值都一致。
p413: Python 執行緒的排程
Python 的執行緒排程機制是內建在 Python 的直譯器核心 PyEval_EvalFrameEx 中的。除了標準的計數排程外,還存在另一種阻塞排程,即線上程 A通過某種操作比如等待輸入或者睡眠等,將自身阻塞後,Python 應該將等待GIL 的執行緒B 喚醒,當然 A 在掛起前肯定需要釋放 GIL。
比如 time.sleep(1) 大概是這樣實現的: { Py_BEGIN_ALLOW_THREADS(釋放GIL) sleep(1); Py_END_ALLOW_THREADS(申請GIL) }
即通過兩個巨集來實現阻塞排程,注意阻塞排程則不會重置 PyEval_EvalFrameEx 內的 _Py_Ticker 為 初始值 _Py_CheckInterval。
注:python中 thread 的一些機制和C/C++不同:在C/C++中,主執行緒結束後,其子執行緒會預設被主執行緒kill 掉。而在python中,主執行緒結束後,預設會等待子執行緒結束後,主執行緒才退出。The entire Python program exits when no alive non-daemon threads are left.
python 對於 thread 的管理中有兩個函式:join 和 setDaemon
join:如在一個執行緒B中呼叫threadA.join(),則 threadA 結束後,執行緒B才會接著 threadA.join() 往後執行。
setDaemon:主執行緒A 啟動了子執行緒B,呼叫B.setDaemaon(True),則主執行緒結束時,會把子執行緒B也殺死,與C/C++ 中的預設效果是一樣的。
p420: Python 執行緒的使用者級互斥與同步
核心級通過 GIL 實現的互斥保護了核心的共享資源,同樣使用者級互斥保護了使用者程式中的共享資源。
使用者級的鎖是用 lockobject 實現的,與GIL 一樣, lock_lock 也指向一個win32 下的 Event 核心物件。
|
1
2 3 4 |
typedef struct {
PyObject_HEAD PyThread_type_lock lock_lock; } lockobject; |
lockobject 物件提供的屬性操作定義在 static PyMethodDef lock_methods[] = { ... }; 需要注意的是當鎖不可用時 lockobject.acquire 操作也是一個阻塞操作,故大概是這樣實現的: { Py_BEGIN_ALLOW_THREADS(釋放GIL) PyThread_acquire_lock(); Py_END_ALLOW_THREADS(申請GIL) }
這是由於執行緒需要等待一個 lock 資源,為了避免死鎖,需要將 GIL 轉交給 其他的等待 GIL 的執行緒,然後呼叫 PyThread_acquire_lock 開始嘗試獲得
使用者級鎖,在獲得使用者級鎖之後,再嘗試獲得核心級lock--GIL。
p430:Python 的記憶體管理機制
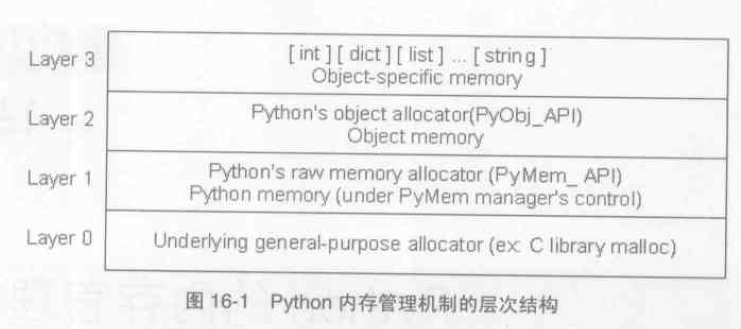
layer 0 即作業系統提供的malloc or free 等介面;layer 1 是Python 基於第0 層包裝而成,沒有加入太多動作,只是為了處理與平臺相關的記憶體分配行為而提供統一的介面; layer 2 主要提供建立Python 物件的介面,這一套函式族又被稱為 Pymalloc 機制;layer 3 主要是常用物件如整數、字串等的緩衝池機制。真正需要分析的是 layer 2 的實現,也是 GC(garbage collector) 的藏身之處。
p432: 小塊空間的記憶體池
在Python 2.5 中,整個小塊記憶體的記憶體池可以視為一個層次結構,在這個層次結構中,一共分為4層,從上至下為:block、pool、arena 和 記憶體池。
前三個都是可以在原始碼中找到的實體,而 “記憶體池” 只是一個概念上的東西,表示Python 對整個小塊記憶體分配和釋放行為的記憶體管理機制。
在最底層,block 是一個確定大小的記憶體塊(8, 16, 24, ...., 256),大小超過256位元組的記憶體申請轉交給layer 1 PyMem 函式族處理。
一個pool 管理一堆具有固定大小的記憶體塊,一個pool 大小通常為一個系統記憶體頁4KB。
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
/* When you say memory, my mind reasons in terms of (pointers to) blocks */
typedef uchar block; /* Pool for small blocks. */ struct pool_header { union { block *_padding; uint count; } ref; /* number of allocated blocks */ block *freeblock; /* pool's free list head */ struct pool_header *nextpool; /* next pool of this size class */ struct pool_header *prevpool; /* previous pool "" */ uint arenaindex; /* index into arenas of base adr */ uint szidx; /* block size class index */ uint nextoffset; /* bytes to virgin block */ uint maxnextoffset; /* largest valid nextoffset */ }; |
一塊經過改造的 4KB 記憶體如下圖:
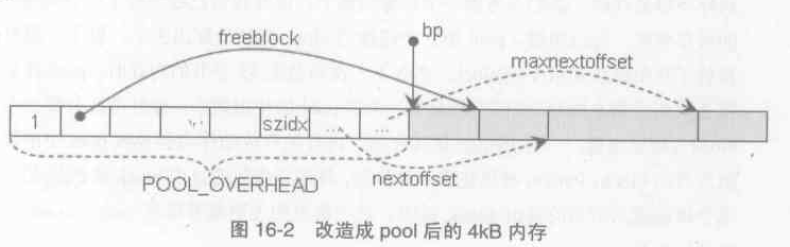
其中實線箭頭是指標,但虛線箭頭只是偏移位置的形象表示。
ref.count 表示已經被分配的block 數量,此時為1。bp 返回的是一個可用地址,實際後面的記憶體都是可用的,但可以肯定申請記憶體的函式只會使用[bp, bp+size] 區間的記憶體,比如申請 25~32 位元組大小的記憶體,會返回一個 32位元組 block 的地址。
szidx 表示 size class index,比如 szidx=3 表示pool 管理的是 32位元組的block 集合。在 pool header 中,nextoffset 和 maxoffset 是兩個用於對pool 中的block 集合進行迭代的變數,如初始化時:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 |
/*
* Initialize the pool header, set up the free list to * contain just the second block, and return the first * block. */ pool->szidx = size; size = INDEX2SIZE(size); // 由szidx 轉換成 size bp = (block *)pool + POOL_OVERHEAD; pool->nextoffset = POOL_OVERHEAD + (size << 1); // POOL_OVERHEAD + 2*size pool->maxnextoffset = POOL_SIZE - size; pool->freeblock = bp + size; *(block **)(pool->freeblock) = NULL; return (void *)bp; |
freeblock 指向下一個可用 的block 地址,而nextoffset 是下下可用block 距離頭部的偏移,故再次分配block 時,只需將freeblock 返回,並將其移動 nextoffset 的距離,同樣地 nextoffset 值加上2個size 距離,即如下程式碼 2)處所示。
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
/*
* There is a used pool for this size class. * Pick up the head block of its free list. */ ++pool->ref.count; bp = pool->freeblock; assert(bp != NULL); if ((pool->freeblock = *(block **)bp) != NULL) // 1) { return (void *)bp; } /* * Reached the end of the free list, try to extend it. */ if (pool->nextoffset <= pool->maxnextoffset) // 2) { /* There is room for another block. */ pool->freeblock = (block *)pool + pool->nextoffset; pool->nextoffset += INDEX2SIZE(size); *(block **)(pool->freeblock) = NULL; return (void *)bp; } |
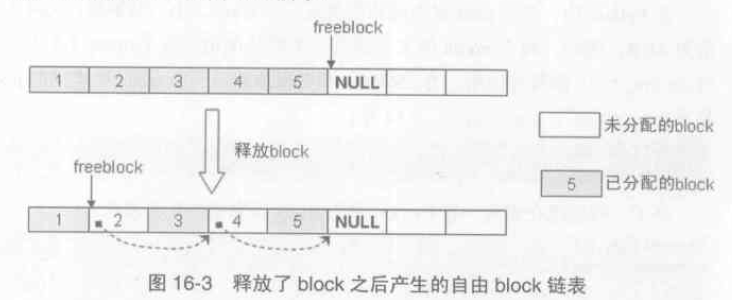
現在考慮一種情況,假設pool 中5個連續的block 都被分配出去了,過一段時間釋放了塊2 和塊4,那麼下一次申請32位元組記憶體,pool 返回的是第2塊還是第6塊呢?出於使用效率顯然是第2塊,具體實現是在 free block 時做的手腳,將一些離散的資源block 組織起來成為自由block 連結串列,而freeblock 則是這個連結串列的表頭,如下程式碼所示:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
pool = POOL_ADDR(p); // p 是 PyObject_Free 的引數
if (Py_ADDRESS_IN_RANGE(p, pool)) { /* We allocated this address. */ /* Link p to the start of the pool's freeblock list. Since * the pool had at least the p block outstanding, the pool * wasn't empty (so it's already in a usedpools[] list, or * was full and is in no list -- it's not in the freeblocks * list in any case). */ assert(pool->ref.count > 0); /* else it was empty */ *(block **)p = lastfree = pool->freeblock; pool->freeblock = (block *)p; ... } |
回到前面分析的block 分配行為,可以知道如果有先前釋放的block 則直接返回如1)處程式碼所示,沒有再進行2)處程式碼判斷,在2)處還需指出一點即 maxoffset 是該pool 最後一個可用block 距離pool header 的偏移,故如果
nextoffset > maxnextoffset 則此pool 已經無block 可用了,可以考慮再申請一個pool 了。
一個area 大小是256KB,可以容納 64個pool,這些pools 可能並不屬於同一個 class size index 。pool_header 管理的記憶體與pool_header 自身是一塊連續的記憶體,而 arena_object 與其管理的記憶體是分離的,也就是說當arena_object 被申請時,它所管理的pool 集合的記憶體還沒被申請,下面是 arena_object 的定義,每個條目註釋都寫得非常清楚,我就不狗尾續貂解釋了。
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 |
// obmalloc.c
#define ARENA_SIZE (256 << 10) /* 256KB */ /* Record keeping for arenas. */ struct arena_object { /* The address of the arena, as returned by malloc. Note that 0 * will never be returned by a successful malloc, and is used * here to mark an arena_object that doesn't correspond to an * allocated arena. */ uptr address; /* Pool-aligned pointer to the next pool to be carved off. */ block *pool_address; /* The number of available pools in the arena: free pools + never- * allocated pools. */ uint nfreepools; /* The total number of pools in the arena, whether or not available. */ uint ntotalpools; /* Singly-linked list of available pools. */ struct pool_header *freepools; /* Whenever this arena_object is not associated with an allocated * arena, the nextarena member is used to link all unassociated * arena_objects in the singly-linked `unused_arena_objects` list. * The prevarena member is unused in this case. * * When this arena_object is associated with an allocated arena * with at least one available pool, both members are used in the * doubly-linked `usable_arenas` list, which is maintained in * increasing order of `nfreepools` values. * * Else this arena_object is associated with an allocated arena * all of whose pools are in use. `nextarena` and `prevarena` * are both meaningless in this case. */ struct arena_object *nextarena; struct arena_object *prevarena; }; |

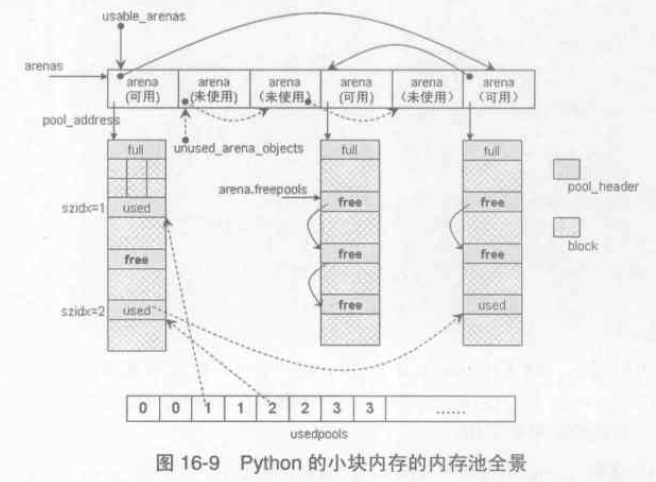
一個pool 在Python 執行的任一時刻,總是處於以下三種狀態之一:
- used 狀態:pool 中至少有一個 block 已經被使用,並且至少有一個block 還未被使用。這種狀態的pool 受控於 Python 內部維護的 usedpools 陣列,對於同樣 class size index 的 pools, usedpools 只儲存一個引用,而它們之間連結成連結串列。
- full 狀態:pool 中所有的 block 都已經被使用,這種狀態的 pool 在 arena 中,但不在 arena 的 freepools 連結串列中;
- empty 狀態:pool 中所有block 都未被使用,處於這個狀態的pool 的集合通過其pool_header 中的next_pool 構成一個連結串列,這個連結串列的表頭就是 arena_object 的 freepools;
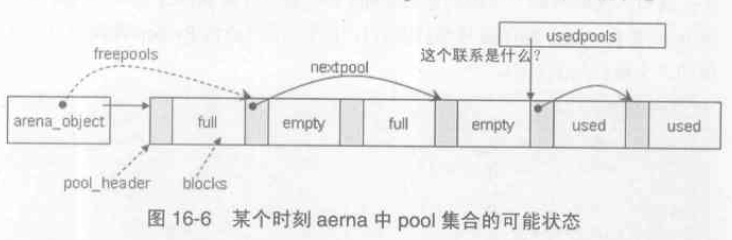
注意:arena 中處於full 狀態的pool 是各自獨立的,並沒有像其他pool 一樣會連結成連結串列。
接著來看一下存放 pool_head 指標的 usedpools 陣列 的定義:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
#define SMALL_REQUEST_THRESHOLD 256
#define ALIGNMENT 8 /* must be 2^N */ #define NB_SMALL_SIZE_CLASSES (SMALL_REQUEST_THRESHOLD / ALIGNMENT) typedef struct pool_header *poolp; #define PTA(x) ((poolp )((uchar *)&(usedpools[2*(x)]) - 2*sizeof(block *))) #define PT(x) PTA(x), PTA(x) static poolp usedpools[2 * ((NB_SMALL_SIZE_CLASSES + 7) / 8) * 8] = { PT(0), PT(1), PT(2), PT(3), PT(4), PT(5), PT(6), PT(7) #if NB_SMALL_SIZE_CLASSES > 8 , PT(8), PT(9), PT(10), PT(11), PT(12), PT(13), PT(14), PT(15) ... #endif } |
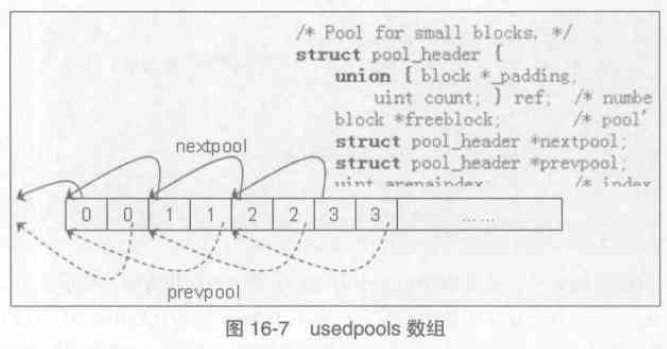
對比pool_header 結構體,此時我們可以發現這樣的規律,usedpools[6]->nextpool == usedpools[6], 因為 usedpools[6] 即 usedpools[4] 的地址,向後偏移8個位元組(一個ref 加上一個 block*),即 &nextpool,也就是 usedpools[6] 的地址。
當我們手中有一個 size 為 32 位元組的pool,想要放入 usedpools 陣列,只需要 usedpools[i+i]->nextpool = pool,其中 i 為size class index。在PyObject_Malloc 程式碼中,利用 usedpools 的巧妙結構,只需要通過簡單判斷來發現與某個class size index 對應的pool 是否在 usedpools 存在,如下:
|
1
2 3 4 5 6 7 8 9 10 11 12 |
size = (uint)(nbytes - 1) >> ALIGNMENT_SHIFT; // class size index
pool = usedpools[size + size]; if (pool != pool->nextpool) // 簡單判斷 { /* * There is a used pool for this size class. * Pick up the head block of its free list. */ // usedpools 有可用的 pool } ... // usedpools 無可用的pool,嘗試獲取 empty 狀態pool |
Python 的小塊記憶體的記憶體池全景可以用下面一幅圖展示:
p457: 迴圈引用的垃圾收集
在Python 中,主要的記憶體管理手段是引用計數機制,而標記--清除(Mark--Sweep)和分代收集只是為了打破迴圈引用而引入的補充技術。Python 中的迴圈引用總是發生在 container 物件之間,即是內部可持有對其他物件引用的物件,比如list、dict、class、instance 等。這些container 物件在建立後必須鏈入到 Python 內部的可收集物件連結串列中去,故需要在物件頭部增加 PyGC_Head,如下圖所示:
|
1
2 3 4 5 6 7 8 9 10 11 |
/* GC information is stored BEFORE the object structure. */
typedef union _gc_head { struct { union _gc_head *gc_next; union _gc_head *gc_prev; Py_ssize_t gc_refs; } gc; long double dummy; /* force worst-case alignment */ } PyGC_Head; |

在 Python 中有一個維護了三個 gc_generation 結構的陣列,通過這個陣列控制流三條可收集物件連結串列,這就是Python 中用於分代垃圾收集的三個“代”。初始化完畢如下圖所示:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
/*** Global GC state ***/
struct gc_generation { PyGC_Head head; int threshold; /* collection threshold */ int count; /* count of allocations or collections of younger generations */ }; #define NUM_GENERATIONS 3 #define GEN_HEAD(n) (&generations[n].head) /* linked lists of container objects */ static struct gc_generation generations[NUM_GENERATIONS] = { /* PyGC_Head, threshold, count */ {{{GEN_HEAD(0), GEN_HEAD(0), 0}}, 700, 0}, {{{GEN_HEAD(1), GEN_HEAD(1), 0}}, 10, 0}, {{{GEN_HEAD(2), GEN_HEAD(2), 0}}, 10, 0}, }; PyGC_Head *_PyGC_generation0 = GEN_HEAD(0); |
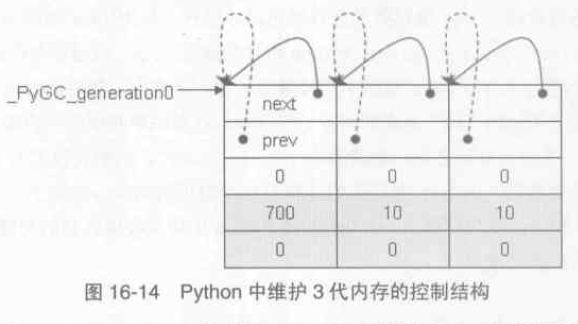
對於每一個gc_generation,其中的count 記錄了當前這條可收集物件連結串列中一共有多少個可收集物件,所有新建立的物件實際上都會被加入第0代連結串列中,即 generations[0].count++。而 threshold 記錄了該條連結串列最多可容納多少個可收集物件,一旦超過將立刻觸發垃圾回收機制。
關於回收機制的大致描述:
/* Find the oldest generation (higest numbered) where the count exceeds the threshold. Objects in the that generation and generations younger than it will be collected. */
具體實現可以看collect 函式,下面列舉比較重要的步驟及註釋:
|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
/* This is the main function. Read this to understand how the * collection process works. */ static Py_ssize_t collect(int generation) { int i; Py_ssize_t m = 0; /* # objects collected */ Py_ssize_t n = 0; /* # unreachable objects that couldn't be collected */ PyGC_Head *young; /* the generation we are examining */ PyGC_Head *old; /* next older generation */ PyGC_Head unreachable; /* non-problematic unreachable trash */ PyGC_Head finalizers; /* objects with, & reachable from, __del__ */ PyGC_Head *gc; double t1 = 0.0; if (delstr == NULL) { delstr = PyString_InternFromString("__del__"); if (delstr == NULL) Py_FatalError("gc couldn't allocate \"__del__\""); } ... /* update collection and allocation counters */ if (generation+1 < NUM_GENERATIONS) generations[generation+1].count += 1; for (i = 0; i <= generation; i++) generations[i].count = 0; /* merge younger generations with one we are currently collecting */ // 1) for (i = 0; i < generation; i++) { gc_list_merge(GEN_HEAD(i), GEN_HEAD(generation)); } ... /* Using ob_refcnt and gc_refs, calculate which objects in the * container set are reachable from outside the set (i.e., have a * refcount greater than 0 when all the references within the * set are taken into account). */ update_refs(young); // 2) subtract_refs(young); /* Leave everything reachable from outside young in young, and move * everything else (in young) to unreachable. * NOTE: This used to move the reachable objects into a reachable * set instead. But most things usually turn out to be reachable, * so it's more efficient to move the unreachable things. */ gc_list_init(&unreachable); move_unreachable(young, &unreachable); // 3) /* Move reachable objects to next generation. */ if (young != old) gc_list_merge(young, old); /* All objects in unreachable are trash, but objects reachable from * finalizers can't safely be deleted. Python programmers should take * care not to create such things. For Python, finalizers means * instance objects with __del__ methods. Weakrefs with callbacks * can also call arbitrary Python code but they will be dealt with by * handle_weakrefs(). */ gc_list_init(&finalizers); move_finalizers(&unreachable, &finalizers); /* finalizers contains the unreachable objects with a finalizer; * unreachable objects reachable *from* those are also uncollectable, * and we move those into the finalizers list too. */ move_finalizer_reachable(&finalizers); // 4) /* Clear weakrefs and invoke callbacks as necessary. */ m += handle_weakrefs(&unreachable, old); /* Call tp_clear on objects in the unreachable set. This will cause * the reference cycles to be broken. It may also cause some objects * in finalizers to be freed. */ delete_garbage(&unreachable, old); // 5) /* Append instances in the uncollectable set to a Python * reachable list of garbage. The programmer has to deal with * this if they insist on creating this type of structure. */ (void)handle_finalizers(&finalizers, old); return n+m; } |
下圖是用於演示標記--清除演算法的例子:

2). update_refs 將PyGC_Head 中的gc.gc_ref 賦值為 其物件 ob_refcnt 值;subtract_refs 將迴圈引用摘除,即對 gc.gc_ref 值做相應減法操作。完成後如下圖:
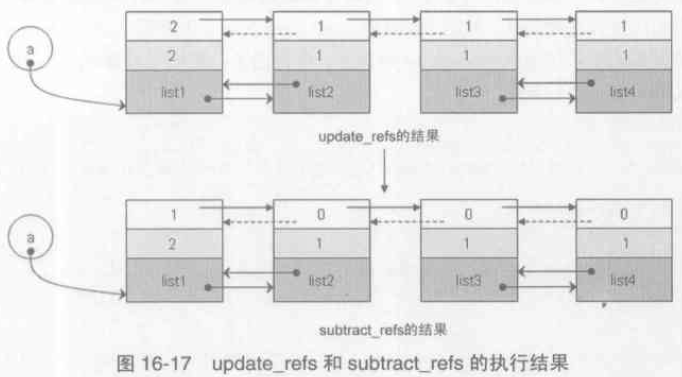
3). 將待處理連結串列的unreachable object 移動到 unreachable 連結串列中。處理完成後如下圖所示:
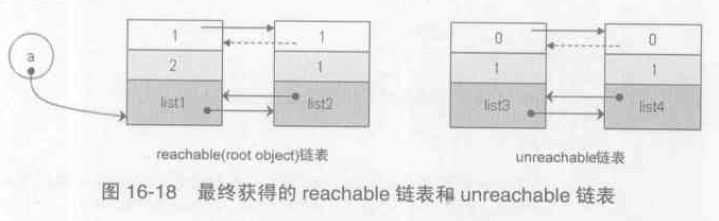
這裡說明下reachable的含義,也就是所謂的標記階段:所謂的root object 是被一些全域性引用和函式棧中的引用所引用的物件,這些物件是不可被刪除的;從 root object 集合出發,沿著集合中的每一個引用,如果能夠達到某個物件 A,則稱 A 是可達的 reachable。如list2 的gc.gc_ref 本來為0,被暫時移動到 unreachable 連結串列中,後來發現root object list1 引用著它,則將其 gc.gc_ref 修改為1,表示 reachable。
4). 對於一類特殊的container 物件,即從類物件例項化得到的例項物件,如果 class 定義中有一個特殊方法:'__del__',則將unreachable 連結串列中擁有 finalizer 的 instance 物件都移動到一個名為 garbage 的PyListObject 物件中。
5). 在3) 中只是使用 gc.gc_ref 模擬量迴圈引用的打破,在 delete_garbage 中會呼叫container 物件的型別物件中的tp_clear 操作,進而調整container 物件中每個引用所用的物件的引用計數值,從而完成打破迴圈引用的最終目標。
注:可以使用Python 中的gc 模組來觀察垃圾回收,如
import gc
gc.set_debug(gc.DEBUG_STATS | gc.DEBUG_LEAK)
gc.collect()
Memory-wise, we already know that subprocess.Popen uses fork/clone under
the hood, meaning that every time you call it you're requesting
once more as much memory as Python is already eating up, i.e. in the hundreds of additional MB, all in order to then exec a
puny 10kB executable such as free or ps.
In the case of an unfavourable overcommit policy, you'll soon see ENOMEM.
相關文章
- 《Python 原始碼剖析》一些理解以及勘誤筆記(1)Python原始碼筆記
- 《Python 原始碼剖析》一些理解以及勘誤筆記(2)Python原始碼筆記
- Python 學習筆記 - socketserver原始碼剖析Python筆記Server原始碼
- Python物件初探(《Python原始碼剖析》筆記一)Python物件原始碼筆記
- Python中的List物件(《Python原始碼剖析》筆記四)Python物件原始碼筆記
- Python中的字串物件(《Python原始碼剖析》筆記三)Python字串物件原始碼筆記
- Python中的整數物件(《Python原始碼剖析》筆記二)Python物件原始碼筆記
- python原始碼閱讀筆記Python原始碼筆記
- 【筆記】jQuery原始碼(文件處理3)筆記jQuery原始碼
- Express原始碼的一些理解Express原始碼
- Java集合原始碼剖析——ArrayList原始碼剖析Java原始碼
- 【Java集合原始碼剖析】ArrayList原始碼剖析Java原始碼
- 【Java集合原始碼剖析】Vector原始碼剖析Java原始碼
- 【Java集合原始碼剖析】HashMap原始碼剖析Java原始碼HashMap
- 【Java集合原始碼剖析】Hashtable原始碼剖析Java原始碼
- 【Java集合原始碼剖析】TreeMap原始碼剖析Java原始碼
- python異常的一些程式碼筆記Python筆記
- 【Java集合原始碼剖析】LinkedList原始碼剖析Java原始碼
- 【Java集合原始碼剖析】LinkedHashmap原始碼剖析Java原始碼HashMap
- PLSA模型的再理解以及原始碼分析模型原始碼
- python筆記(3)Python筆記
- python筆記3Python筆記
- Python 3 學習筆記之——錯誤和異常Python筆記
- 誤刪了一些學習筆記筆記
- 原始碼筆記 — MBProgressHUD原始碼筆記
- 對於Redux原始碼的一些理解Redux原始碼
- epoll–原始碼剖析原始碼
- HashMap原始碼剖析HashMap原始碼
- Alamofire 原始碼剖析原始碼
- Handler原始碼剖析原始碼
- Kafka 原始碼剖析Kafka原始碼
- TreeMap原始碼剖析原始碼
- SDWebImage原始碼剖析(-)Web原始碼
- Boost原始碼剖析--原始碼
- redis個人原始碼分析筆記3---redis的事件驅動原始碼分析Redis原始碼筆記事件
- python3 筆記Python筆記
- Spring原始碼剖析9:Spring事務原始碼剖析Spring原始碼
- 深入理解 Python 虛擬機器:整型(int)的實現原理及原始碼剖析Python虛擬機原始碼