(轉載)機器學習知識點(十二)座標下降法(Coordinate descent)
首先介紹一個演算法:coordinate-wise minimization
問題的描述:給定一個可微的凸函式
形式化的描述為:是不是

這裡的
答案為成立。
這是因為:

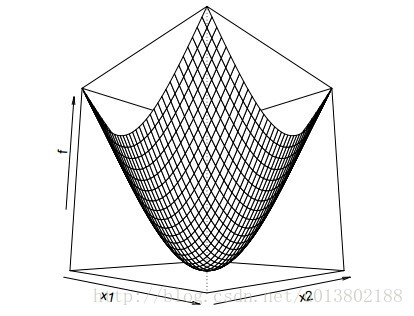
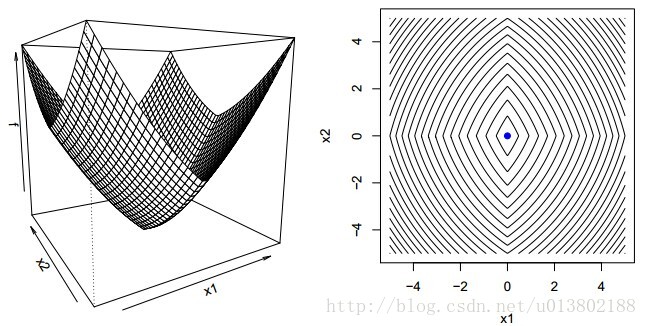
但是問題來了,如果對於凸函式f,若不可微該會怎樣呢?
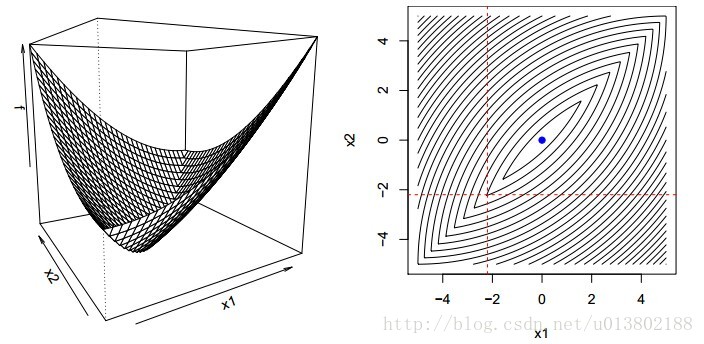
答案為不成立,上面的圖片就給出了一個反例。
那麼同樣的問題,現在
答案為成立。
證明如下,對每一個y
座標下降(Coordinate descent):
這就意味著,對所有的

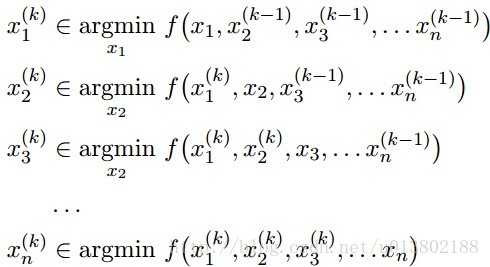
每一次我們解決了
Tseng (2001)的開創性工作證明:對這種f(f在緊集

在實分析領域:


其中:
座標下降的順序是任意的,可以是從1到n的任意排列。
可以在任何地方將單個的座標替代成座標塊
關鍵在於一次一個地更新,所有的一起更新有可能會導致不收斂
我們現在討論一下座標下降的應用:
線性迴歸:
令


最小化xi,對所有的xj,j不等於i:

解得:
座標下降重複這個更新對所有的

對比座標下降與梯度下降線上性迴歸中的表現(100個例項,n=100,p=20)
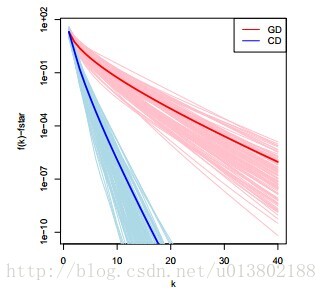
將座標下降的一圈與梯度下降的一次迭代對比是不是公平呢?是的。

其中r=y-Ax。每一次的座標更新需要O(n)個操作,其中O(n)去更新r,O(n)去計算
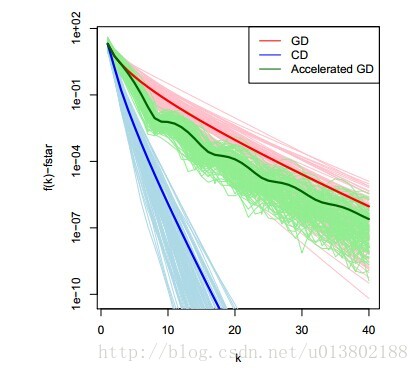
我們用相同的例子,用梯度下降進行比較,似乎是與計算梯度下降的最優性相違背。
那麼座標下降是一個一階的方法嗎?事實上不是,它使用了比一階更多的資訊。
現在我們再關注一下支援向量機:
SVM對偶中的座標下降策略:

SMO(Sequentialminimal optimization)演算法是兩塊的座標下降,使用貪心法選擇下一塊,而不是用迴圈。
回撥互補鬆弛條件(complementaryslackness conditions):

v,d,s是原始的係數,截距和鬆弛,其中
SMO重複下面兩步:
選出不滿足互補鬆弛的αi,αj
最小化αi,αj使所有的變數滿足條件
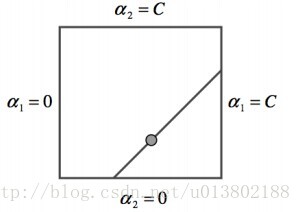
第一步使用啟發式的方法貪心得尋找αi,αj,第二步使用等式約束。
——————維基百科的解釋——————
座標下降優化方法是一種非梯度優化演算法。為了找到一個函式的區域性極小值,在每次迭代中可以在當前點處沿一個座標方向進行一維搜尋。在整個過程中迴圈使用不同的座標方向。一個週期的一維搜尋迭代過程相當於一個梯度迭代。
座標下降法基於最小化多變數目標函式可以通過每次沿一個方向最小化目標函式來求解。與梯度方法的變化的梯度方向不同,座標下降方法固定其他的梯度方向。例如,座標方向為e1,e2,…,en。每次沿一個座標方向最小化目標函式,迴圈地沿每個座標方向進行計算。如果給定Xk,Xk+1的第i個座標由如下給定:
從初始值X0求取F的區域性值,然後迭代的求取一個序列X0,X1,X2,…
通過在每次迭代中進行一維搜尋,可以有如下結論:
It can be shown that this sequence has similar convergence properties as steepest descent. No improvement after one cycle of line search along coordinate directions implies a stationary point is reached.
This process is illustrated below.
其實,gradient descent 方法是利用目標函式的導數(梯度)來確定搜尋方向的,而該梯度方向可能不與任何座標軸平行。而coordinate descent方法是利用當前座標系統進行搜尋,不需要求目標函式的導數,只按照某一座標方向進行搜尋最小值。
相關文章
- 梯度下降法、座標下降法、牛頓迭代法梯度
- 座標系相關知識科普
- 十二、java知識點——類載入機制(硬貨)Java
- 機器學習知識點整理(三)機器學習
- (轉載)ios開發知識總結 — 下iOS
- 機器學習之梯度下降法機器學習梯度
- 知識管理(轉載)
- 機器學習vs深度學習及其知識點機器學習深度學習
- 常用的機器學習&資料探勘知識(點)機器學習
- ArcEngine下投影座標和經緯度座標的相互轉換
- 機器學習方法(一)——梯度下降法機器學習梯度
- 〔轉載〕ALV知識
- vue 實現高德座標轉GPS座標Vue
- 機器學習知識點(十)馬爾可夫鏈機器學習馬爾可夫
- 第六個OpenGL程式,Coordinate Systems 座標系統 後續之 3D 33D
- canvas座標系原點Canvas
- canvas 座標系原點Canvas
- ogre世界座標魚螢幕座標相互轉換
- 首次「機器學習」挑戰賽下週開始,內含知識點劇透機器學習
- 機器學習之隨機梯度下降法機器學習隨機梯度
- 第六個OpenGL程式,Coordinate Systems 座標系統 後續之 3D 1(這個圖形有點奇怪)3D
- 標準LO Datasource增強知識點
- vue知識點整理(轉發)Vue
- 乾貨丨機器學習知識點(人工智慧篇)機器學習人工智慧
- 利用齊次座標進行二維座標轉換
- JavaSE基礎知識分享(十二)Java
- C++ opencv的圓轉矩形,極座標轉笛卡爾座標系C++OpenCV
- 機器學習知識積累機器學習
- MathNet Ray3D座標系下轉換3D
- 《JavaScript 模式》知識點小抄本(下)JavaScript模式
- Html標籤知識點學習筆記HTML筆記
- 關於標籤元素的重點知識
- Lasso迴歸演算法: 座標軸下降法與最小角迴歸法小結演算法
- 十二、pytorch的基礎知識PyTorch
- 統計模型機器學習模型領域相關知識,指標概念及問題點積累模型機器學習指標
- Qt - 座標系及轉換QT
- 個人知識管理感悟和ppt下載
- 機器學習基礎知識1機器學習