五分鐘理解一致性雜湊演算法(consistent hashing)
一致性雜湊演算法在1997年由麻省理工學院提出的一種分散式雜湊(DHT)實現演算法,設計目標是為了解決因特網中的熱點(Hot spot)問題,初衷和CARP十分類似。一致性雜湊修正了CARP使用的簡 單雜湊演算法帶來的問題,使得分散式雜湊(DHT)可以在P2P環境中真正得到應用。
一致性hash演算法提出了在動態變化的Cache環境中,判定雜湊演算法好壞的四個定義:
1、平衡性(Balance):平衡性是指雜湊的結果能夠儘可能分佈到所有的緩衝中去,這樣可以使得所有的緩衝空間都得到利用。很多雜湊演算法都能夠滿足這一條件。
2、單調性(Monotonicity):單調性是指如果已經有一些內容通過雜湊分派到了相應的緩衝中,又有新的緩衝加入到系統中。雜湊的結果應能夠保證原有已分配的內容可以被對映到原有的或者新的緩衝中去,而不會被對映到舊的緩衝集合中的其他緩衝區。
3、分散性(Spread):在分散式環境中,終端有可能看不到所有的緩衝,而是隻能看到其中的一部分。當終端希望通過雜湊過程將內容對映到緩衝上時,由於不同終端所見的緩衝範圍有可能不同,從而導致雜湊的結果不一致,最終的結果是相同的內容被不同的終端對映到不同的緩衝區中。這種情況顯然是應該避免的,因為它導致相同內容被儲存到不同緩衝中去,降低了系統儲存的效率。分散性的定義就是上述情況發生的嚴重程度。好的雜湊演算法應能夠儘量避免不一致的情況發生,也就是儘量降低分散性。
4、負載(Load):負載問題實際上是從另一個角度看待分散性問題。既然不同的終端可能將相同的內容對映到不同的緩衝區中,那麼對於一個特定的緩衝區而言,也可能被不同的使用者對映為不同 的內容。與分散性一樣,這種情況也是應當避免的,因此好的雜湊演算法應能夠儘量降低緩衝的負荷。
在分散式叢集中,對機器的新增刪除,或者機器故障後自動脫離叢集這些操作是分散式叢集管理最基本的功能。如果採用常用的hash(object)%N演算法,那麼在有機器新增或者刪除後,很多原有的資料就無法找到了,這樣嚴重的違反了單調性原則。接下來主要講解一下一致性雜湊演算法是如何設計的:
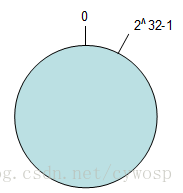
環形Hash空間
按照常用的hash演算法來將對應的key雜湊到一個具有2^32次方個桶的空間中,即0~(2^32)-1的數字空間中。現在我們可以將這些數字頭尾相連,想象成一個閉合的環形。如下圖
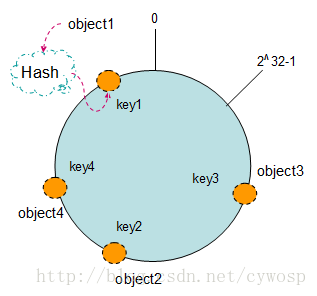
把資料通過一定的hash演算法處理後對映到環上
現在我們將object1、object2、object3、object4四個物件通過特定的Hash函式計算出對應的key值,然後雜湊到Hash環上。如下圖:
Hash(object1) = key1;
Hash(object2) = key2;
Hash(object3) = key3;
Hash(object4) = key4;
將機器通過hash演算法對映到環上 (#add 將資料和機器對映到同一個環上是關鍵思想)
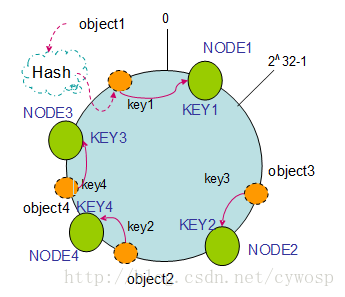
在採用一致性雜湊演算法的分散式叢集中將新的機器加入,其原理是通過使用與物件儲存一樣的Hash演算法將機器也對映到環中(一般情況下對機器的hash計算是採用機器的IP或者機器唯一的別名作為輸入值),然後以順時針的方向計算,將所有物件儲存到離自己最近的機器中。
假設現在有NODE1,NODE2,NODE3三臺機器,通過Hash演算法得到對應的KEY值,對映到環中,其示意圖如下:
Hash(NODE1) = KEY1;
Hash(NODE2) = KEY2;
Hash(NODE3) = KEY3;
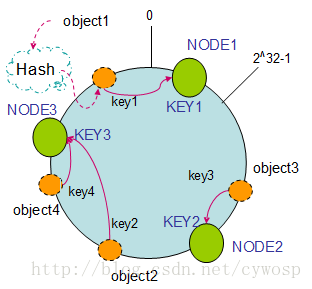
通過上圖可以看出物件與機器處於同一雜湊空間中,這樣按順時針轉動object1儲存到了NODE1中,object3儲存到了NODE2中,object2、object4儲存到了NODE3中。在這樣的部署環境中,hash環是不會變更的,因此,通過算出物件的hash值就能快速的定位到對應的機器中,這樣就能找到物件真正的儲存位置了。
機器的刪除與新增
普通hash求餘演算法最為不妥的地方就是在有機器的新增或者刪除之後會照成大量的物件儲存位置失效,這樣就大大的不滿足單調性了。下面來分析一下一致性雜湊演算法是如何處理的。
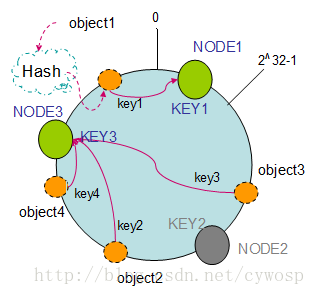
1. 節點(機器)的刪除
以上面的分佈為例,如果NODE2出現故障被刪除了,那麼按照順時針遷移的方法,object3將會被遷移到NODE3中,這樣僅僅是object3的對映位置發生了變化,其它的物件沒有任何的改動。如下圖:
2. 節點(機器)的新增
如果往叢集中新增一個新的節點NODE4,通過對應的雜湊演算法得到KEY4,並對映到環中,如下圖:
通過按順時針遷移的規則,那麼object2被遷移到了NODE4中,其它物件還保持這原有的儲存位置。通過對節點的新增和刪除的分析,一致性雜湊演算法在保持了單調性的同時,還使資料的遷移達到了最小,這樣的演算法對分散式叢集來說是非常合適的,避免了大量資料遷移,減小了伺服器的的壓力。
平衡性
根據上面的圖解分析,一致性雜湊演算法滿足了單調性和負載均衡的特性以及一般hash演算法的分散性,但這還並不能當做其被廣泛應用的原由,因為還缺少了平衡性。下面將分析一致性雜湊演算法是如何滿足平衡性的。hash演算法是不保證平衡的,如上面只部署了NODE1和NODE3的情況(NODE2被刪除的圖),object1儲存到了NODE1中,而object2、object3、object4都儲存到了NODE3中,這樣就照成了非常不平衡的狀態。在一致性雜湊演算法中,為了儘可能的滿足平衡性,其引入了虛擬節點。
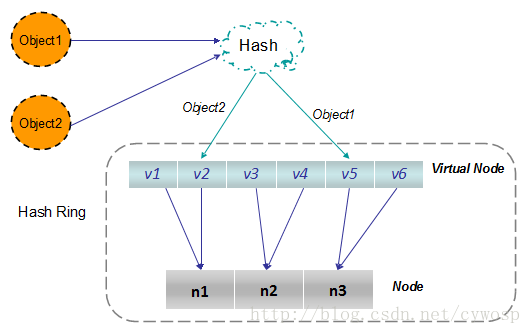
——“虛擬節點”( virtual node )是實際節點(機器)在 hash 空間的複製品( replica ),一個實際節點(機器)對應了若干個“虛擬節點”,這個對應個數也成為“複製個數”,“虛擬節點”在 hash 空間中以hash值排列。
以上面只部署了NODE1和NODE3的情況(NODE2被刪除的圖)為例,之前的物件在機器上的分佈很不均衡,現在我們以2個副本(複製個數)為例,這樣整個hash環中就存在了4個虛擬節點,最後物件對映的關係圖如下:
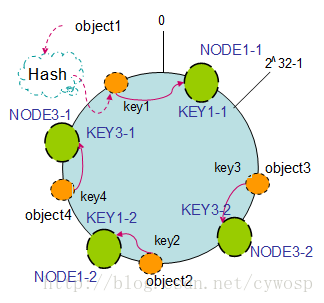
根據上圖可知物件的對映關係:object1->NODE1-1,object2->NODE1-2,object3->NODE3-2,object4->NODE3-1。通過虛擬節點的引入,物件的分佈就比較均衡了。那麼在實際操作中,正真的物件查詢是如何工作的呢?物件從hash到虛擬節點到實際節點的轉換如下圖:
“虛擬節點”的hash計算可以採用對應節點的IP地址加數字字尾的方式。例如假設NODE1的IP地址為192.168.1.100。引入“虛擬節點”前,計算 cache A 的 hash 值:
Hash(“192.168.1.100”);
引入“虛擬節點”後,計算“虛擬節”點NODE1-1和NODE1-2的hash值:
Hash(“192.168.1.100#1”); // NODE1-1
Hash(“192.168.1.100#2”); // NODE1-2
參考:
相關文章
- 一致性雜湊演算法(consistent hashing)【轉】演算法
- 5分鐘理解一致性雜湊演算法演算法
- 一致性 hash 演算法( consistent hashing )演算法
- 五分鐘看懂一致性雜湊演算法演算法
- 詳解Consistent Hashing演算法演算法
- 一致性雜湊演算法演算法
- 你知道雜湊演算法,但你知道一致性雜湊嗎?演算法
- 一致性雜湊演算法 PHP 實現演算法PHP
- 一致性雜湊演算法原理設計演算法
- [Redis]一致性雜湊Redis
- 分散式系統中一致性雜湊演算法分散式演算法
- PHP實現一致性雜湊演算法(轉的)PHP演算法
- 對一致性雜湊演算法的深入研究演算法
- 一致性雜湊負載均衡演算法的探討負載演算法
- 3.1 雜湊演算法演算法
- 區域性敏感雜湊(Locality-Sensitive Hashing, LSH)方法介紹
- 深入理解雜湊表(JAVA和Redis雜湊表實現)JavaRedis
- 雜湊技術【雜湊表】查詢演算法 PHP 版演算法PHP
- consistent read(讀一致性)的通俗理解
- 淺析雜湊演算法演算法
- 雜湊演算法簡介演算法
- 雜湊查詢演算法演算法
- 超酷演算法:同型雜湊演算法
- 分散式資料快取中的一致性雜湊演算法分散式快取演算法
- Redis中的一致性雜湊問題Redis
- consistent read(讀一致性)的通俗理解(轉)
- 全面瞭解一致性雜湊演算法及PHP程式碼實現演算法PHP
- 演算法學習-雜湊表演算法
- 22 | 雜湊演算法(下):雜湊演算法在分散式系統中有哪些應用?演算法分散式
- 分散式系統基礎-一致性雜湊分散式
- 一致性雜湊演算法及其在分散式系統中的應用演算法分散式
- 圖解一致性雜湊演算法,看這一篇就夠了!圖解演算法
- 【六褘-Java】雜湊演算法記憶體圖;set集合低層採用雜湊表儲存元素;雜湊演算法的流程Java演算法記憶體
- js 雜湊雜湊值的模組JS
- 雜湊表(雜湊表)詳解
- 【資料結構與演算法學習】雜湊表(Hash Table,雜湊表)資料結構演算法
- 查詢演算法及雜湊表演算法
- MD5雜湊加密演算法加密演算法