OpenCV-Python教程(9)(10)(11): 使用霍夫變換檢測直線 直方圖均衡化 輪廓檢測
OpenCV-Python教程(9、使用霍夫變換檢測直線)
相比C++而言,Python適合做原型。本系列的文章介紹如何在Python中用OpenCV圖形庫,以及與C++呼叫相應OpenCV函式的不同之處。這篇文章介紹在Python中使用OpenCV的霍夫變換檢測直線。
提示:
- 轉載請詳細註明原作者及出處,謝謝!
- 本文介紹在OpenCV-Python中使用霍夫變換檢測直線的方法。
- 本文不介詳細的理論知識,讀者可從其他資料中獲取相應的背景知識。筆者推薦清華大學出版社的《影象處理與計算機視覺演算法及應用(第2版) 》。
霍夫變換
Hough變換是經典的檢測直線的演算法。其最初用來檢測影象中的直線,同時也可以將其擴充套件,以用來檢測影象中簡單的結構。
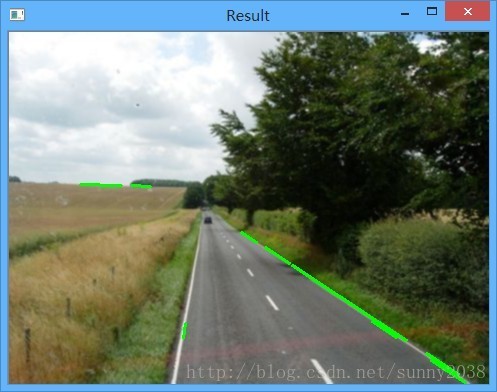
OpenCV提供了兩種用於直線檢測的Hough變換形式。其中基本的版本是cv2.HoughLines。其輸入一幅含有點集的二值圖(由非0畫素表示),其中一些點互相聯絡組成直線。通常這是通過如Canny運算元獲得的一幅邊緣影象。cv2.HoughLines函式輸出的是[float, float]形式的ndarray,其中每個值表示檢測到的線(ρ , θ)中浮點點值的引數。下面的例子首先使用Canny運算元獲得影象邊緣,然後使用Hough變換檢測直線。其中HoughLines函式的引數3和4對應直線搜尋的步長。在本例中,函式將通過步長為1的半徑和步長為π/180的角來搜尋所有可能的直線。最後一個引數是經過某一點曲線的數量的閾值,超過這個閾值,就表示這個交點所代表的引數對(rho, theta)在原影象中為一條直線。具體理論可參考這篇文章。
- #coding=utf-8
- import cv2
- import numpy as np
- img = cv2.imread("/home/sunny/workspace/images/road.jpg", 0)
- img = cv2.GaussianBlur(img,(3,3),0)
- edges = cv2.Canny(img, 50, 150, apertureSize = 3)
- lines = cv2.HoughLines(edges,1,np.pi/180,118) #這裡對最後一個引數使用了經驗型的值
- result = img.copy()
- for line in lines[0]:
- rho = line[0] #第一個元素是距離rho
- theta= line[1] #第二個元素是角度theta
- print rho
- print theta
- if (theta < (np.pi/4. )) or (theta > (3.*np.pi/4.0)): #垂直直線
- #該直線與第一行的交點
- pt1 = (int(rho/np.cos(theta)),0)
- #該直線與最後一行的焦點
- pt2 = (int((rho-result.shape[0]*np.sin(theta))/np.cos(theta)),result.shape[0])
- #繪製一條白線
- cv2.line( result, pt1, pt2, (255))
- else: #水平直線
- # 該直線與第一列的交點
- pt1 = (0,int(rho/np.sin(theta)))
- #該直線與最後一列的交點
- pt2 = (result.shape[1], int((rho-result.shape[1]*np.cos(theta))/np.sin(theta)))
- #繪製一條直線
- cv2.line(result, pt1, pt2, (255), 1)
- cv2.imshow('Canny', edges )
- cv2.imshow('Result', result)
- cv2.waitKey(0)
- cv2.destroyAllWindows()
結果如下:

注意:
在C++中,HoughLines函式得到的結果是一個向量lines,其中的元素是由兩個元素組成的子向量(rho, theta),所以lines的訪問方式類似二維陣列。因此,可以以類似:
- std::vector<cv::Vec2f>::const_iterator it= lines.begin();
- float rho= (*it)[0];
- float theta= (*it)[1];
這樣的方式訪問rho和theta。
而在Python中,返回的是一個三維的np.ndarray!。可通過檢驗HoughLines返回的lines的ndim屬性得到。如:
- lines = cv2.HoughLines(edges,1,np.pi/180,118)
- print lines.ndim
- #將得到3
- #上面例子中檢測到的lines的資料
- 3 #lines.ndim屬性
- (1, 5, 2) #lines.shape屬性
- #lines[0]
- [[ 4.20000000e+01 2.14675498e+00]
- [ 4.50000000e+01 2.14675498e+00]
- [ 3.50000000e+01 2.16420817e+00]
- [ 1.49000000e+02 1.60570288e+00]
- [ 2.24000000e+02 1.74532920e-01]]
- ===============
- #lines本身
- [[[ 4.20000000e+01 2.14675498e+00]
- [ 4.50000000e+01 2.14675498e+00]
- [ 3.50000000e+01 2.16420817e+00]
- [ 1.49000000e+02 1.60570288e+00]
- [ 2.24000000e+02 1.74532920e-01]]]
概率霍夫變換
觀察前面的例子得到的結果圖片,其中Hough變換看起來就像在影象中查詢對齊的邊界畫素點集合。但這樣會在一些情況下導致虛假檢測,如畫素偶然對齊或多條直線穿過同樣的對齊畫素造成的多重檢測。
要避免這樣的問題,並檢測影象中分段的直線(而不是貫穿整個影象的直線),就誕生了Hough變化的改進版,即概率Hough變換(Probabilistic Hough)。在OpenCV中用函式cv::HoughLinesP 實現。如下:
- #coding=utf-8
- import cv2
- import numpy as np
- img = cv2.imread("/home/sunny/workspace/images/road.jpg")
- img = cv2.GaussianBlur(img,(3,3),0)
- edges = cv2.Canny(img, 50, 150, apertureSize = 3)
- lines = cv2.HoughLines(edges,1,np.pi/180,118)
- result = img.copy()
- #經驗引數
- minLineLength = 200
- maxLineGap = 15
- lines = cv2.HoughLinesP(edges,1,np.pi/180,80,minLineLength,maxLineGap)
- for x1,y1,x2,y2 in lines[0]:
- cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2)
- cv2.imshow('Result', img)
- cv2.waitKey(0)
- cv2.destroyAllWindows()
未完待續。。。
參考資料:
1、《Opencv2 Computer Vision Application Programming Cookbook》
2、《OpenCV References Manule》
OpenCV-Python教程(10、直方圖均衡化)
相比C++而言,Python適合做原型。本系列的文章介紹如何在Python中用OpenCV圖形庫,以及與C++呼叫相應OpenCV函式的不同之處。這篇文章介紹在Python中使用OpenCV和NumPy對直方圖進行均衡化處理。
提示:
- 轉載請詳細註明原作者及出處,謝謝!
- 本文不介詳細的理論知識,讀者可從其他資料中獲取相應的背景知識。筆者推薦清華大學出版社的《影象處理與計算機視覺演算法及應用(第2版) 》,對於本節的內容,建議直接參考維基百科直方圖均衡化,只需看下頁面最後的兩幅圖就能懂了。
本文內容:
- 使用查詢表拉伸直方圖
- 使用OpenCV和NumPy的函式以不同的方式進行直方圖均衡化
在某些情況下,一副影象中大部分畫素的強度都集中在某一區域,而質量較高的影象中,畫素的強度應該均衡的分佈。為此,可將表示畫素強度的直方圖進行拉伸,將其平坦化。如下:

圖來自維基百科
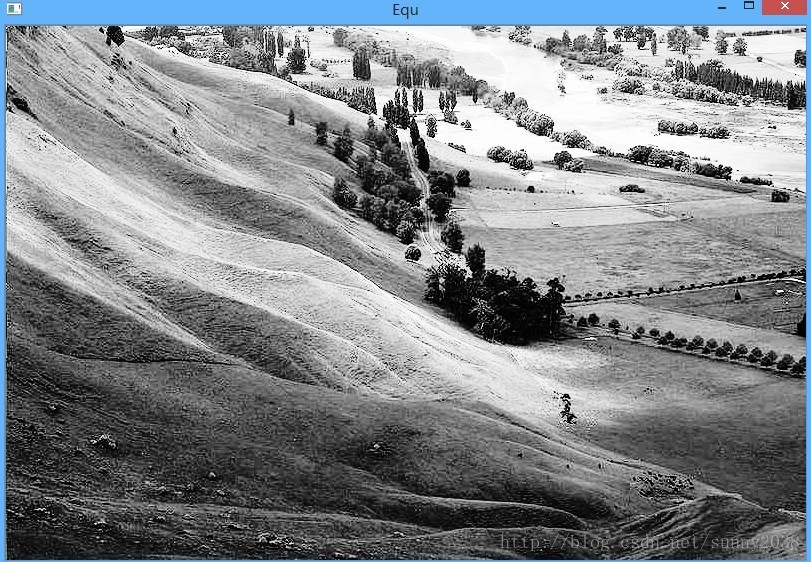
實驗資料
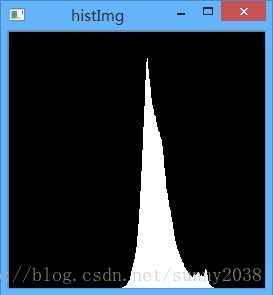
本節的實驗資料來自維基百科,原圖如下:

其直方圖為:
使用查詢表來拉伸直方圖
在影象處理中,直方圖均衡化一般用來均衡影象的強度,或增加影象的對比度。在介紹使用直方圖均衡化來拉伸影象的直方圖之前,先介紹使用查詢表的方法。
觀察上圖中原始影象的直方圖,很容易發現大部分強度值範圍都沒有用到。因此先檢測影象非0的最低(imin)強度值和最高(imax)強度值。將最低值imin設為0,最高值imax設為255。中間的按255.0*(i-imin)/(imax-imin)+0.5)的形式設定。
實現的任務主要集中在查詢表的建立中,程式碼如下:
- minBinNo, maxBinNo = 0, 255
- #計算從左起第一個不為0的直方圖位置
- for binNo, binValue in enumerate(hist):
- if binValue != 0:
- minBinNo = binNo
- break
- #計算從右起第一個不為0的直方圖位置
- for binNo, binValue in enumerate(reversed(hist)):
- if binValue != 0:
- maxBinNo = 255-binNo
- break
- print minBinNo, maxBinNo
- #生成查詢表,方法來自參考文獻1第四章第2節
- for i,v in enumerate(lut):
- print i
- if i < minBinNo:
- lut[i] = 0
- elif i > maxBinNo:
- lut[i] = 255
- else:
- lut[i] = int(255.0*(i-minBinNo)/(maxBinNo-minBinNo)+0.5)
- #計算
- result = cv2.LUT(image, lut)
cv2.LUT函式只有兩個引數,分別為輸入影象和查詢表,其返回處理的結果,完整程式碼如下:
- #coding=utf-8
- import cv2
- import numpy as np
- image = cv2.imread("D:/test/unequ.jpg", 0)
- lut = np.zeros(256, dtype = image.dtype )#建立空的查詢表
- hist= cv2.calcHist([image], #計算影象的直方圖
- [0], #使用的通道
- None, #沒有使用mask
- [256], #it is a 1D histogram
- [0.0,255.0])
- minBinNo, maxBinNo = 0, 255
- #計算從左起第一個不為0的直方圖柱的位置
- for binNo, binValue in enumerate(hist):
- if binValue != 0:
- minBinNo = binNo
- break
- #計算從右起第一個不為0的直方圖柱的位置
- for binNo, binValue in enumerate(reversed(hist)):
- if binValue != 0:
- maxBinNo = 255-binNo
- break
- print minBinNo, maxBinNo
- #生成查詢表,方法來自參考文獻1第四章第2節
- for i,v in enumerate(lut):
- print i
- if i < minBinNo:
- lut[i] = 0
- elif i > maxBinNo:
- lut[i] = 255
- else:
- lut[i] = int(255.0*(i-minBinNo)/(maxBinNo-minBinNo)+0.5)
- #計算
- result = cv2.LUT(image, lut)
- cv2.imshow("Result", result)
- cv2.imwrite("LutImage.jpg", result)
- cv2.waitKey(0)
- cv2.destroyAllWindows()
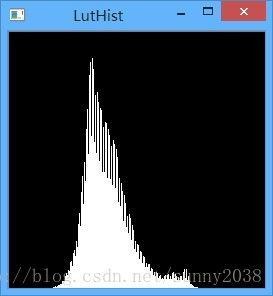
處理結果為:

關於直方圖的繪製,請參考這篇文章。
直方圖均衡化
介紹
有時影象的視覺上的缺陷並不在強度值集中在很窄的範圍內。而是某些強度值的使用頻率很大。比如第一幅圖中,灰度圖中間值的佔了很大的比例。
在完美均衡的直方圖中,每個柱的值都應該相等。即50%的畫素值應該小於128,25%的畫素值應該小於64。總結出的經驗可定義為:在標準的直方圖中p%的畫素擁有的強度值一定小於或等於255×p%。將該規律用於均衡直方圖中:強度i的灰度值應該在對應的畫素強度值低於i的百分比的強度中。因此,所需的查詢表可以由下面的式子建立:
- lut[i] = int(255.0 *p[i]) #p[i]是是強度值小於或等於i的畫素的數目。
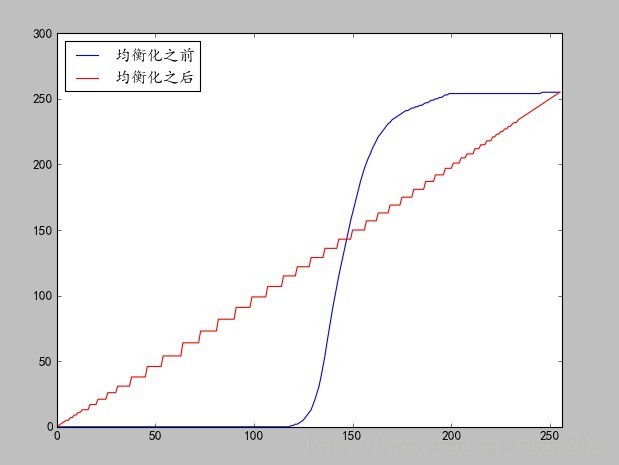
而完美均衡的直方圖,其累積直方圖應為一條斜線,如上圖中均衡化之後的紅線。
更專業一點,這種累積直方圖應稱為累積分佈(cumulative distribition)。在NumPy中有一個專門的函式來計算。這在NumPy實現直方圖均衡化一節中介紹。
通過上面的介紹,應該可以明白,直方圖均衡化就是對影象使用一種特殊的查詢表。在第三個例子中可以看到使用查詢表來獲得直方圖均衡化的效果。通常來說,直方圖均衡化大大增加了影象的表象。但根據影象可視內容的不同,不同影象的直方圖均衡化產生的效果不盡相同。
直方圖均衡化之OpenCV函式實現
用OpenCV實現直方圖均衡化很簡單,只需呼叫一個函式即可:
- img = cv2.imread('影象路徑',0)
- equ = cv2.equalizeHist(img)
- cv2.imshow('equ',equ)
直方圖均衡化之NumPy函式實現
通過前面的介紹,可以明白直方圖均衡化就是用一種特殊的查詢表來實現的。所以這裡用NumPy函式,以查詢表的方式手動實現影象直方圖的均衡化:
- #coding=utf-8
- import cv2
- import numpy as np
- image = cv2.imread("D:/test/unequ.jpg", 0)
- lut = np.zeros(256, dtype = image.dtype )#建立空的查詢表
- hist,bins = np.histogram(image.flatten(),256,[0,256])
- cdf = hist.cumsum() #計算累積直方圖
- cdf_m = np.ma.masked_equal(cdf,0) #除去直方圖中的0值
- cdf_m = (cdf_m - cdf_m.min())*255/(cdf_m.max()-cdf_m.min())#等同於前面介紹的lut[i] = int(255.0 *p[i])公式
- cdf = np.ma.filled(cdf_m,0).astype('uint8') #將掩模處理掉的元素補為0
- #計算
- result2 = cdf[image]
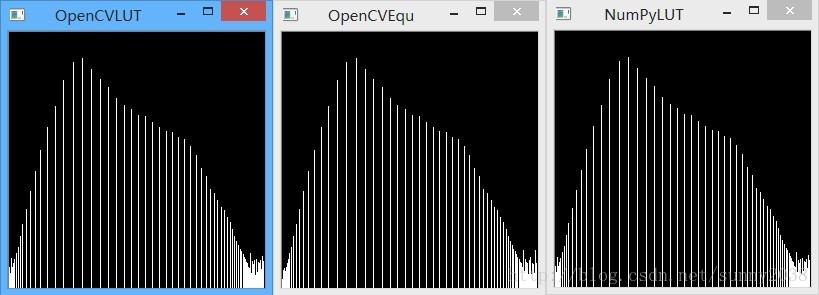
- result = cv2.LUT(image, cdf)
- cv2.imshow("OpenCVLUT", result)
- cv2.imshow("NumPyLUT", result2)
- cv2.waitKey(0)
- cv2.destroyAllWindows()
驗證
比較查詢表和OpenCV直方圖均衡化生成的直方圖:
參考資料:
1、《Opencv2 Computer Vision Application Programming Cookbook》
2、《OpenCV References Manule》
3、http://opencvpython.blogspot.com/2013/03/histograms-2-histogram-equalization.html
OpenCV-Python教程(11、輪廓檢測)
相比C++而言,Python適合做原型。本系列的文章介紹如何在Python中用OpenCV圖形庫,以及與C++呼叫相應OpenCV函式的不同之處。這篇文章介紹在Python中使用OpenCV檢測並繪製輪廓。
提示:
- 轉載請詳細註明原作者及出處,謝謝!
- 本文介紹在OpenCV-Python中檢測並繪製輪廓的方法。
- 本文不介詳細的理論知識,讀者可從其他資料中獲取相應的背景知識。筆者推薦清華大學出版社的《影象處理與計算機視覺演算法及應用(第2版) 》。
輪廓檢測
輪廓檢測也是影象處理中經常用到的。OpenCV-Python介面中使用cv2.findContours()函式來查詢檢測物體的輪廓。
實現
使用方式如下:
- import cv2
- img = cv2.imread('D:\\test\\contour.jpg')
- gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
- ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
- contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
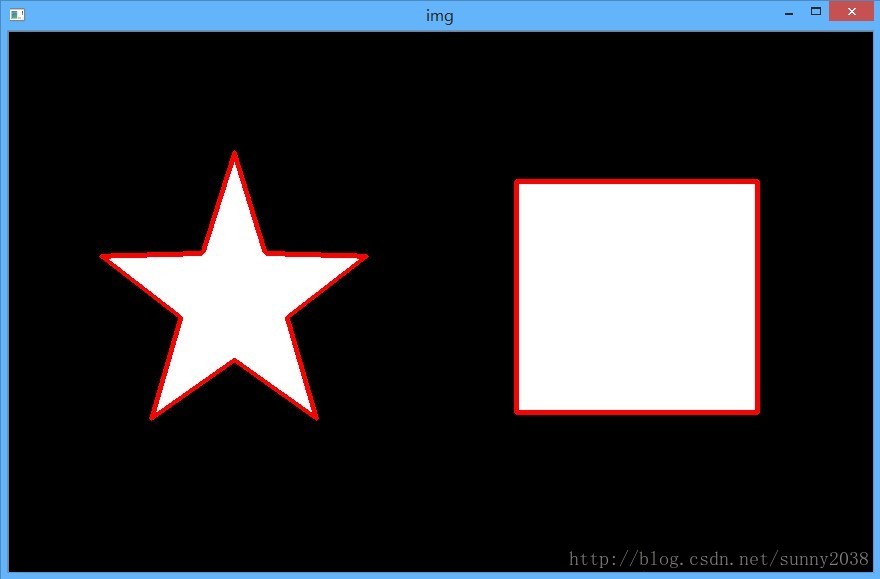
- cv2.drawContours(img,contours,-1,(0,0,255),3)
- cv2.imshow("img", img)
- cv2.waitKey(0)
需要注意的是cv2.findContours()函式接受的引數為二值圖,即黑白的(不是灰度圖),所以讀取的影象要先轉成灰度的,再轉成二值圖,參見4、5兩行。第六行是檢測輪廓,第七行是繪製輪廓。
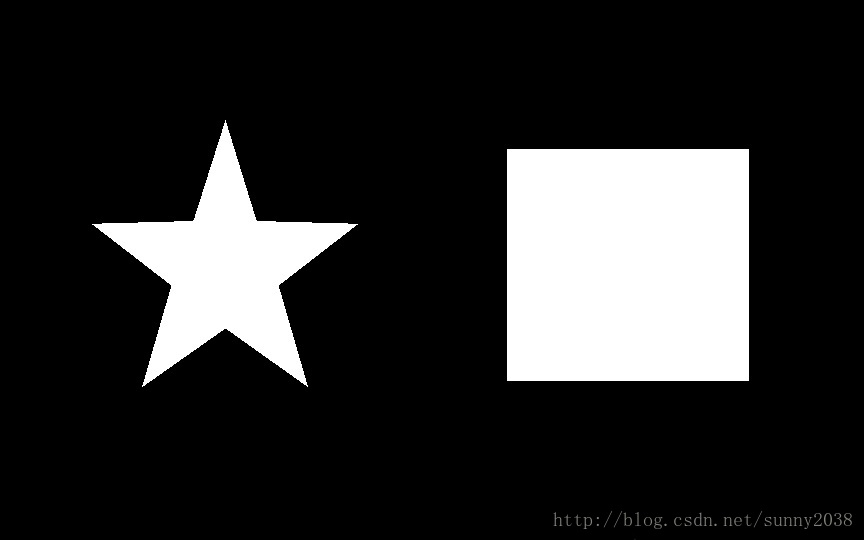
結果
原圖如下:
檢測結果如下:
注意,findcontours函式會“原地”修改輸入的影象。這一點可通過下面的語句驗證:
- cv2.imshow("binary", binary)
- contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
- cv2.imshow("binary2", binary)
cv2.findContours()函式
函式的原型為
- cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
引數
第一個引數是尋找輪廓的影象;
第二個參數列示輪廓的檢索模式,有四種(本文介紹的都是新的cv2介面):
cv2.RETR_EXTERNAL表示只檢測外輪廓
cv2.RETR_LIST檢測的輪廓不建立等級關係
cv2.RETR_CCOMP建立兩個等級的輪廓,上面的一層為外邊界,裡面的一層為內孔的邊界資訊。如果內孔內還有一個連通物體,這個物體的邊界也在頂層。
cv2.RETR_TREE建立一個等級樹結構的輪廓。
第三個引數method為輪廓的近似辦法
cv2.CHAIN_APPROX_NONE儲存所有的輪廓點,相鄰的兩個點的畫素位置差不超過1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE壓縮水平方向,垂直方向,對角線方向的元素,只保留該方向的終點座標,例如一個矩形輪廓只需4個點來儲存輪廓資訊
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似演算法
返回值
cv2.findContours()函式返回兩個值,一個是輪廓本身,還有一個是每條輪廓對應的屬性。
contour返回值
cv2.findContours()函式首先返回一個list,list中每個元素都是影象中的一個輪廓,用numpy中的ndarray表示。這個概念非常重要。在下面drawContours中會看見。通過- print (type(contours))
- print (type(contours[0]))
- print (len(contours))
由於我們知道返回的輪廓有兩個,因此可通過
- cv2.drawContours(img,contours,0,(0,0,255),3)
- cv2.drawContours(img,contours,1,(0,255,0),3)
- print (len(contours[0]))
- print (len(contours[1]))
hierarchy返回值
此外,該函式還可返回一個可選的hiararchy結果,這是一個ndarray,其中的元素個數和輪廓個數相同,每個輪廓contours[i]對應4個hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分別表示後一個輪廓、前一個輪廓、父輪廓、內嵌輪廓的索引編號,如果沒有對應項,則該值為負數。
通過
- print (type(hierarchy))
- print (hierarchy.ndim)
- print (hierarchy[0].ndim)
- print (hierarchy.shape)
- 3
- 2
- (1, 2, 4)
輪廓的繪製
OpenCV中通過cv2.drawContours在影象上繪製輪廓。
cv2.drawContours()函式
- cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset ]]]]])
- 第一個引數是指明在哪幅影象上繪製輪廓;
- 第二個引數是輪廓本身,在Python中是一個list。
- 第三個引數指定繪製輪廓list中的哪條輪廓,如果是-1,則繪製其中的所有輪廓。後面的引數很簡單。其中thickness表明輪廓線的寬度,如果是-1(cv2.FILLED),則為填充模式。繪製引數將在以後獨立詳細介紹。
補充:
寫著寫著發現一篇文章介紹不完,所以這裡先作為入門的。更多關於輪廓的資訊有機會再開一篇文章介紹。
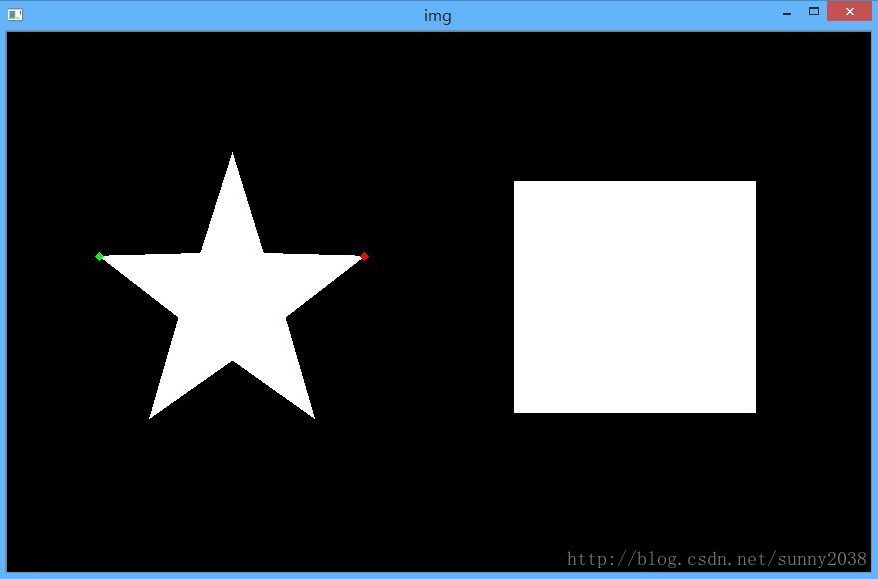
但有朋友提出計算輪廓的極值點。可用下面的方式計算得到,如下
- pentagram = contours[1] #第二條輪廓是五角星
- leftmost = tuple(pentagram[:,0][pentagram[:,:,0].argmin()])
- rightmost = tuple(pentagram[:,0][pentagram[:,:,0].argmin()])
- cv2.circle(img, leftmost, 2, (0,255,0),3)
- cv2.circle(img, rightmost, 2, (0,0,255),3)
注意!假設輪廓有100個點,OpenCV返回的ndarray的維數是(100, 1, 2)!!!而不是我們認為的(100, 2)。切記!!!人民郵電出版社出版了一本《NumPy攻略:Python科學計算與資料分析》,推薦去看一下。
更新:關於pentagram[:,0]的意思
在numpy的陣列中,用逗號分隔的是軸的索引。舉個例子,假設有如下的陣列:
- a = np.array([[[3,4]], [[1,2]],[[5,7]],[[3,7]],[[1,8]]])
- [3,4], [1,2], [5,7], [3,7], [1,8]
回頭看一下,a的shape是(5,1,2),表明是三個軸的。在numpy的陣列中,軸的索引是通過逗號分隔的。同時冒號索引“:”表示的是該軸的所有元素。因此a[:, 0]表示的是第一個軸的所有元素和第二個軸的第一個元素。在這裡既等價於a[0:5, 0]。
再者,若給出的索引數少於陣列中總索引數,則將已給出的索引樹預設按順序指派到軸上。比如a[0:5,0]只給出了兩個軸的索引,則第一個索引就是第一個軸的,第二個索引是第二個軸的,而第三個索引沒有,則預設為[:],即該軸的所有內容。因此a[0:5,0]也等價於a[0:5,0:0:2]。
再詳細一點,a的全體內容為:[[[3,4]], [[1,2]],[[5,7]],[[3,7]],[[1,8]]]。去掉第一層方括號,其中有五個元素,每個元素為[[3,4]]這樣的,所以第一個索引的範圍為[0:5]。注意OpenCV函式返回的多維陣列和常見的numpy陣列的不同之處!
觀察[[3,4]],我們發現其中只有一個元素,即[3, 4],第二個索引為[0:1]。
再去掉一層方括號,我們面對的是[3,4],有兩個元素,所以第三個索引的範圍為[0:2]。
再次強調一下OpenCVPython介面函式返回的NumPy陣列和普通的NumPy陣列在組織上的不同之處。
PS:OpenCV-Python討論群——219962286,歡迎大家加入互相探討學習。
得到的結果為如下:
參考資料:
1、《Opencv2 Computer Vision Application Programming Cookbook》
2、《OpenCV References Manule》
from: http://blog.csdn.net/sunny2038/article/category/904451
相關文章
- 霍夫變換檢測圓
- 3. OpenCV-Python——影像梯度演算法、邊緣檢測、影像金字塔與輪廓檢測、直方圖與傅立葉變換OpenCVPython梯度演算法直方圖
- 【OpenCV】影像變換(四-1)-霍夫變換線段檢測OpenCV
- 【OpenCV】影像變換(四-2)霍夫變換圓檢測OpenCV
- 霍夫檢測圓:霍夫梯度法梯度
- 霍夫變換圓檢測原理及 OpenCV API 應用OpenCVAPI
- 【OpenCV教程】輪廓檢測過程OpenCV
- 直方圖均衡化直方圖
- 收集直方圖及檢視直方圖資訊直方圖
- 詳解 Hough 變換(基本原理與直線檢測)
- OpenCV計算機視覺學習(9)——影像直方圖 & 直方圖均衡化OpenCV計算機視覺直方圖
- OpenCV之影象直方圖均衡化OpenCV直方圖
- 灰度直方圖均衡化及其實現直方圖
- 直方圖均衡化原理與實現直方圖
- OpenCvSharp手繪ROI區域+模板匹配+霍夫變換檢測圓的邊界OpenCV
- halcon-直方圖均衡直方圖
- 灰度影像直方圖均衡化公式及實現直方圖公式
- 計算機視覺 OpenCV Android | 基本特徵檢測之 霍夫圓檢計算機視覺OpenCVAndroid特徵
- 一文搞懂直方圖均衡直方圖
- OpenCV7影像金字塔與輪廓檢測OpenCV
- 影像演算法之直方圖均衡化(灰度影像)演算法直方圖
- oracle直方圖使用Oracle直方圖
- 【效能優化】直方圖優化直方圖
- 關於高度均衡和頻率均衡的直方圖直方圖
- [20170615]直方圖-高度直方圖(11g).txt直方圖
- 直方圖直方圖
- HOG:用於人體檢測的梯度方向直方圖 Histograms of Oriented Gradients for Human DetectionHOG梯度直方圖Histogram
- 輪廓檢測論文解讀 | 整體巢狀邊緣檢測HED | CVPR | 2015巢狀
- 【16位RAW影像處理三】直方圖均衡化及區域性直方圖均衡用於16點陣圖像的細節增強。直方圖
- 無線入侵檢測讓無線安全檢測變得簡單
- 直方圖(histograms)直方圖Histogram
- 7.3 直方圖直方圖
- oracle 直方圖Oracle直方圖
- 使用直方圖注意事項直方圖
- OpenCV計算機視覺學習(8)——影像輪廓處理(輪廓繪製,輪廓檢索,輪廓填充,輪廓近似)OpenCV計算機視覺
- 【火爐煉AI】機器學習047-影像的直方圖均衡化操作AI機器學習直方圖
- 帶你讀AI論文:基於Transformer的直線段檢測AIORM
- [數字影像學筆記] 4.直方圖變換2筆記直方圖