模仿脊椎動物的機器人:運動神經網路觸發行走、游泳
原文:Robot mimics vertebrate motion
翻譯:趙屹華
責編:周建丁(zhoujd@csdn.net)

瑞士洛桑聯邦理工大學(EPFL)的科學家最近新研製出了一款機器人“Pleurobot”,這款機器人能夠精細地模擬蠑螈的行走和游泳行為。
除了概念炫酷之外(今後還可能成為迪士尼的賣點之一),研究人員相信,機器人的設計方案將提供一種新的工具,有助於瞭解脊椎動物的運動的演化。這能使我們更好地理解脊髓是如何控制身體的運動,它將有助於癱瘓和截肢病人的康復治療和假肢研發。
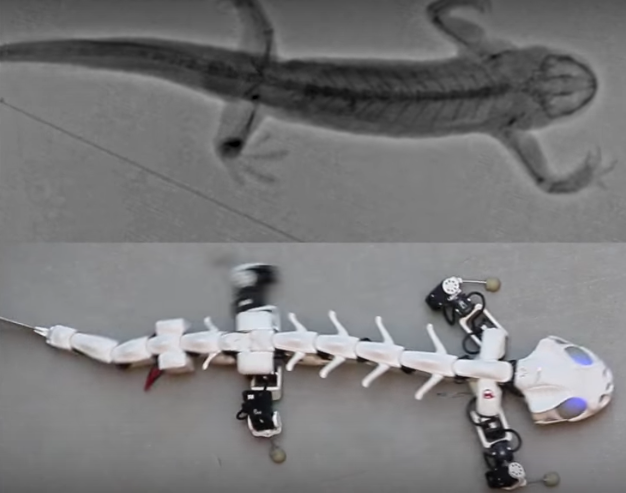
3D模擬蠑螈的運動需要滿足特別高的精度要求。生物機器人實驗室的科學家起初從頂部和側面拍攝有肋螈這種蠑螈的精細射線視訊,當蠑螈在水中或是陸地上運動時跟蹤其骨架上的64個關鍵點。
接著,Auke Ijspeert與他的團隊製作了3D列印的骨骼和活動關節,並且用電子電路開發了一套“神經系統”,使得Pleurobot能夠行走、爬行,乃至在水中游泳。
Ijspeert認為Pleurobot的設計方式將有助於開發其它型別的“生物機器人”,這將成為神經科學和生物力學領域的重要工具。
發表在皇家學會雜誌《Interface》上的這項研究已經獲得了來自瑞士國家機器人研究中心(NCCR)和瑞士國家自然科學基金的科研經費。
視訊參考:https://youtu.be/jMWMJ1wv9w4(科學上網)
論文摘要
機器人作為一種技術工具,越來越多地應用於動物運動的研究中。然而,因為動物骨骼肌肉系統的複雜性和當前機器人技術的限制,設計一個能夠恰當模擬動物運動和動態特性的機器人則是困難重重。我們結合了高速射線運動攝製、系統優化、動態擴充套件、三維列印和高階伺服電機等技術提出了一種構造機器人Pleurobot的設計方案:一種高度模仿蠑螈生物特性的機器人——Pleurodeles waltl。我們在之前的機器人上進行測試,驗證了通過肢體和脊椎的運動神經網路來觸發基本游泳和行走運動的假設。我們基於Pleurobot所演示的設計方案有助於研究更豐富的蠑螈運動技能。我們特別關注的是如何用更多的下級通道和更詳細的肢體中樞模式發生器網路來擴充我們的脊髓模型,從而掌握更多的運動技能。Pleurobot是一款動態縮放兩棲蠑螈機器人,自由度多達27個。基於我們的設計方案,這款機器人可以實現動物的絕大多數自由度和活動範圍,尤其是四肢的活動。我們從X射線視訊中提取的原始運動資料,控制機器人的關節在水中和陸地上的基本運動。機器人的相對前進速度和橫向位移與動物的行為資料高度匹配。行走過程中的地面反作用力也類似於動物的地面反應力。我們因此預計,Pleurobot的設計方案會極其有助於今後對蠑螈運動技能的研究。
參考文獻:
K. Karakasiliotis, R. Thandiackal, K. Melo, T. Horvat, N. K. Mahabadi, S. Tsitkov, J. M. Cabelguen, A. J. Ijspeert. From cineradiography to biorobots: an approach for designing robots to emulate and study animal locomotion. Interface 2016 DOI: 10.1098/rsif.2015.1089
CCAI 2016中國人工智慧大會將於8月26-27日在京舉行,AAAI主席,多位院士,MIT、微軟、大疆、百度、滴滴專家領銜全球技術領袖和產業先鋒打造國內人工智慧前沿平臺,6+重磅大主題報告,4大專題論壇,1000+高質量參會嘉賓,探討人機互動、機器學習、模式識別及產業實戰。門票限時六折優惠中。
相關文章
- 大資料觸動了網路安全哪根神經?大資料
- 機器人運動學機器人
- 【自己動手寫神經網路】---人人都可以學的神經網路書神經網路
- 移動機器人運動規劃及運動模擬機器人
- 無脊椎動物靠什麼支撐起身體?
- CNNIC:馬雲實際控股恆生電子,觸動了哪些人的神經?CNN
- 無處不在的人工神經網路:機器人擁有意識的關鍵神經網路機器人
- 微型機器人可避免生物系統運動對藥物運輸的影響機器人
- 卷積網路雖動人,膠囊網路更傳“神”卷積
- 神經網路的發展史神經網路
- 神經網路(二):感知機神經網路
- 特斯拉開發 Dojo 神經網路訓練計算機;CMU 新實驗改善機器人知覺神經網路計算機機器人
- 演算法-機器人的運動範圍演算法機器人
- 「川言川語」:神經網路RNN模仿川普的語言風格神經網路RNN
- 神經網路篇——從程式碼出發理解BP神經網路神經網路
- 自己動手實現神經網路分詞模型神經網路分詞模型
- JZ-066-機器人的運動範圍機器人
- 物聯網+AI 支援抗疫,“無接觸”機器人服務保障方艙穩定運轉AI機器人
- 神經網路:numpy實現神經網路框架神經網路框架
- 基於圖神經網路的動態物化檢視管理神經網路
- 神經網路神經網路
- 劍指 Offer 13. 機器人的運動範圍機器人
- 利用進化方法自動生成神經網路:深度進化網路DENSER神經網路
- 【深度學習篇】--神經網路中的卷積神經網路深度學習神經網路卷積
- LSTM神經網路神經網路
- 8、神經網路神經網路
- BP神經網路神經網路
- 模糊神經網路神經網路
- 【機器學習】動手寫一個全連線神經網路(一)機器學習神經網路
- 淺聊卷積神經網路的發展卷積神經網路
- 聊聊從腦神經到神經網路神經網路
- 冠狀病毒:行走的網際網路威脅制造機
- 圖神經網路GNN 庫,液體神經網路LNN/LFM神經網路GNN
- 計算機潛意識- 單層神經網路(感知器)計算機神經網路
- 為什麼說BP神經網路就是人工神經網路的一種?神經網路
- 從規則到神經網路:機器翻譯技術的演化之路神經網路
- 非常震撼的純CSS3人物行走動畫CSSS3動畫
- 首場ACRV機器人視覺挑戰,全卷積神經網路實現互動式醫學影像分割 | AI一週學術機器人視覺卷積神經網路AI