stm32f103,407系列的定時器的理解與程式碼
作為一個學習32不久的菜鳥,寫這篇部落格主要還是為了分享一下自己的理解,以後自己忘了也可以來看一下。前幾天在玩oled屏,想把按鍵控制舵機顯示在oled上,於是把之前在f407系列的32的pwm.c檔案修改了一下,加了進去,發現竟然沒用,以前也是會移植修改程式碼都沒問題,但是這回百思不得其解,仔細檢查了一遍,都把函式裡一個一個量點進去核對都沒問題,後來一查手冊,原來這個pwm輸出用的是TIM13,但是f103系列只有11個定時器;
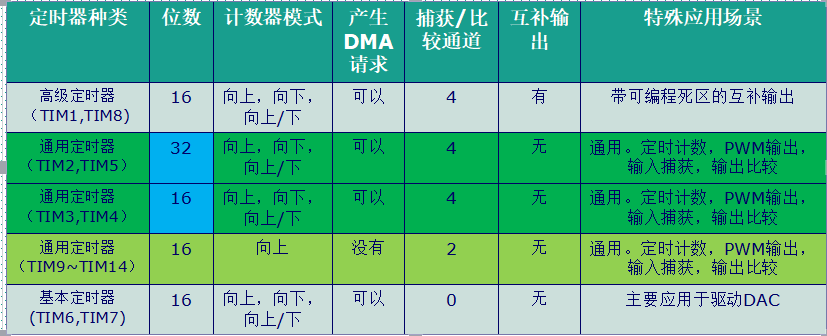
103系列定時器:2個高階定時器,4個普通定時器,2個基本定時器,2個看門狗定時器,1個系統嘀嗒定時器

這8個定時器都是16位的,它們的計數器的模式(TIM_CounterMode)除了基本定時器TIM6和TIM7都支援向上,向下,向上/向下這3種計數模式,基本定時器(TIM6,TIM7)的主要功能:
只有最基本的定時功能,。基本定時器TIM6和TIM7各包含一個16位自動裝載計數器,由各自的可程式設計預分頻器驅動
通用定時器(TIM2~TIM5)的主要功能:
除了基本的定時器的功能外,還具有測量輸入訊號的脈衝長度( 輸入捕獲) 或者產生輸出波形( 輸出比較和PWM)
高階定時器(TIM1,TIM8)的主要功能:
高階定時器不但具有基本,通用定時器的所有的功能,還具有控制交直流電動機所有的功能,你比如它可以輸出6路互補帶死區的訊號,剎車功能等等
f407系列定時器:
PWM輸出模式:
STM32的PWM輸出有兩種模式:模式1和模式2,由TIMx_CCMRx暫存器中的OCxM位確定的(“110”為模式1,“111”為模式2)。區別:模式1(pwm1)-->比比較值compare小是高電平,在比較值compare大低電平,pwm2反之
向上計數和向下計數的問題就輸出pwm的效果而言,沒有區別,可以不改其他任何東西,把向上計數和向下計數切換,效果一模一樣。
f103pwm配置程式碼框架:
//PWM輸出初始化
//arr:自動重灌值
//psc:時鐘預分頻數
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外設時鐘使能
//設定該引腳為複用輸出功能,輸出TIM1 CH1的PWM脈衝波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //複用推輓輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //設定在下一個更新事件裝入活動的自動重灌載暫存器週期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //設定用來作為TIMx時脈頻率除數的預分頻值 不分頻
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //設定時鐘分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的引數初始化TIMx的時間基數單位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇定時器模式:TIM脈衝寬度調製模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_Pulse = 0; //設定待裝入捕獲比較暫存器的脈衝值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸出比較極性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根據TIM_OCInitStruct中指定的引數初始化外設TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主輸出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1預裝載使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的預裝載暫存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}f407:
//arr:自動重灌值
//psc:時鐘預分頻數
void TIM13_PWM_Init(u32 arr,u32 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM13,ENABLE); //TIM13時鐘使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTF時鐘
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_TIM13); //GPIOF9複用為定時器14
/*
最開始的時候舵機怎麼無論如何都轉不起來,很傷心,最後發現不是每個IO口都是
可以作為PWM輸出口的到資料手冊裡一查,發現每個定時器通道都有對應自己的pwm
輸出通道,比如TIM_CH是 PA7/F9,TIM13_CH為 PF8/A6,選任意一個就可以
*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //複用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推輓複用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定時器分頻
//TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Down;
TIM_TimeBaseStructure.TIM_Period=arr; //自動重灌載值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM13,&TIM_TimeBaseStructure);//初始化定時器13
//初始化TIM13 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈衝寬度調製模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸出比較極性低
TIM_OC1Init(TIM13, &TIM_OCInitStructure); //根據T指定的引數初始化外設TIM13
TIM_OC1PreloadConfig(TIM13, TIM_OCPreload_Enable); //使能TIM13在CCR1上的預裝載暫存器
TIM_ARRPreloadConfig(TIM13,ENABLE);//ARPE使能
TIM_Cmd(TIM13, ENABLE); //使能TIM13
} 相關文章
- 【STM32F4】利用定時器實現最基本的定時功能(HAL)定時器
- (轉)stm32的can匯流排理解及應用——程式對應stm32f103系列
- stm32系列--同一定時器雙通道捕獲定時器
- STM32密碼器程式碼密碼
- STM32F1和STM32F4系列DMA的不同之處——對STM32的DMA的工作機制和場景的一些理解[原創www.cnblogs.com/helesheng]
- STM32F429微控制器的時鐘系統淺析
- Openmv 與 Stm32f407通訊
- stm32f103在使用定時器1重對映引腳輸出PWM定時器
- STM32標準庫通用定時器PWM生成定時器
- STM32F207時鐘系統解析
- STM32 定時器詳細篇(基於HAL庫)定時器
- STM32G431RBT6之定時器05定時器
- STM32 HAL 定時器代替HAL_Delay延時函式定時器函式
- STM32F103xC,xD,xE引腳定義
- 基於STM32的SNTP授時伺服器的研究與設計伺服器
- stm32f10x系列學習筆記(三)ADC筆記
- STM32標準庫通用定時器輸入捕獲定時器
- 關於STM32的BSRR(埠位設定/清除暫存器) 和 BRR(埠位清除暫存器) 的理解(初學32)
- 【STM32+HAL庫】使用通用定時器生成的PWM實現呼吸燈效果定時器
- stm32f429學習記錄
- 【春節歌曲回味 | STM32小音樂盒 】PWM+定時器驅動無源蜂鳴器(STM32 HAL庫)定時器
- STM32中SYSTICK定時器、埠複用和重對映定時器
- STM32F103的CAN結構體學習結構體
- STM32F4 timer定時器觸發ADC採集,DMA轉運資料 (標準庫)定時器
- ARM 與 STM32 的關係
- 【補檔STM32】STM32F103俄羅斯方塊遊戲實現遊戲
- STM32F103 主控 DIY 組裝的 開源四軸飛行器
- Stm32學習筆記(四)通用定時器基本原理筆記定時器
- STM32時鐘系統配置程式原始碼深入分析原始碼
- STM32系列 PWM輸出
- STM32F401最小系統微控制器介紹
- STM32時鐘配置
- STM32 GPIO 暫存器的配置
- STM32F1xx的5個串列埠使用方法串列埠
- STM32F303VCT6[STM32] 32bit ARM Cortex M4,嵌入式 - MCU
- STM32F334用keil5的debug除錯時出現問題除錯
- 手把手入門stm32f4 (1)
- STM32F103ZET6---DMA簡介