相機標定工具GML Camera Calibration的使用教程
GML是一款簡單直接的相機標定軟體,附上下載地址:http://graphics.cs.msu.ru/en/node/909。
下載後需要安裝,在安裝的目錄下面有現成的棋盤格PDF檔案,可以直接用於列印。我使用的是預設安裝位置,其PDF檔案位於C:\Program Files (x86)\GML\GML Camera Calibration 0.75\Calibration pattern目錄下。

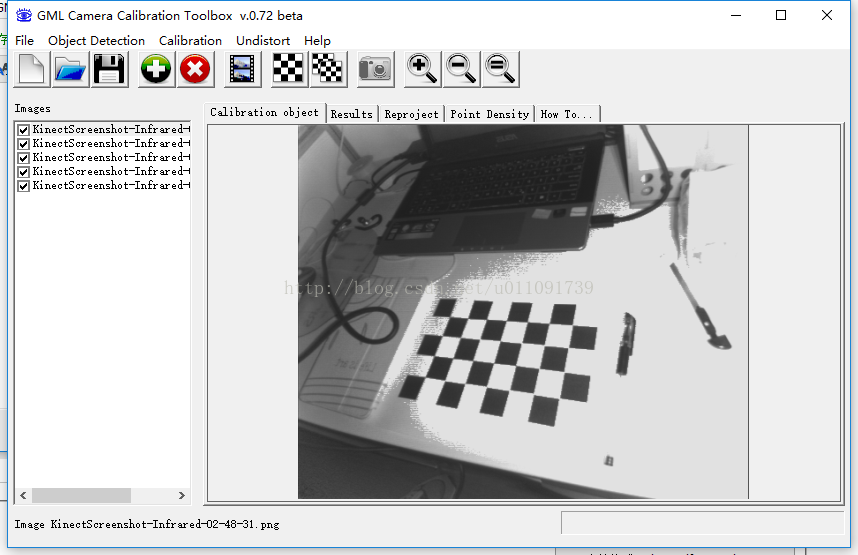
安裝好之後,執行軟體介面為:
選擇File->New Project
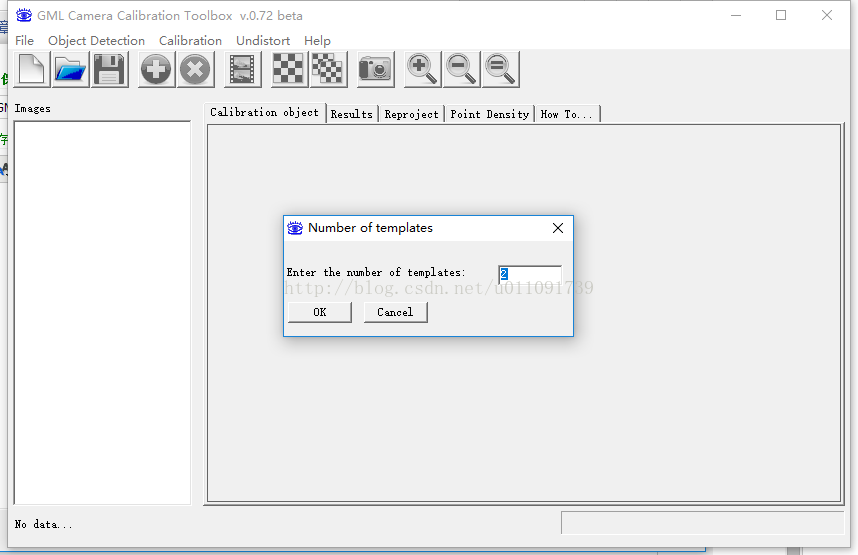
彈出對話方塊如下,要求輸入模板數量,這裡模板數量是指你照片中棋盤格的種類數量,比如:只有照片中只有一張棋盤格就填寫1,照片中有兩張棋盤格就填寫2,以此類推。
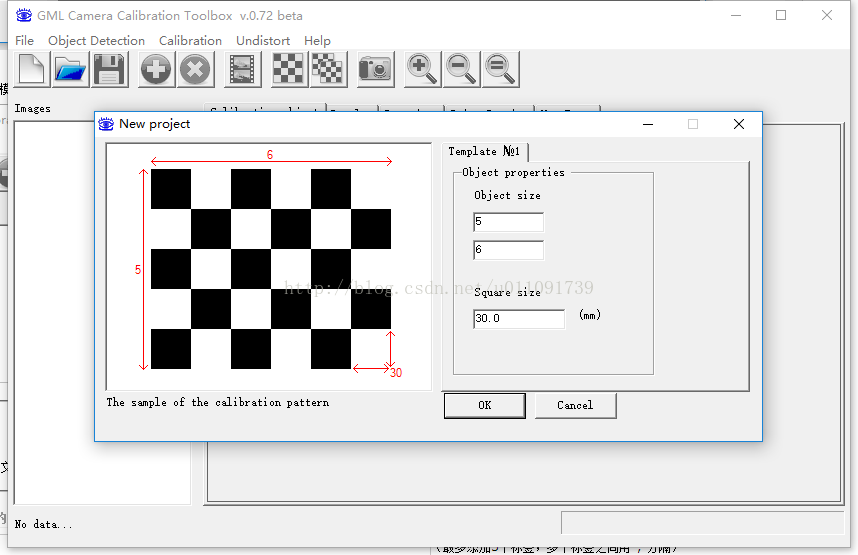
點選確認,會彈出對話方塊要求填寫棋盤格引數:
再點選Add Image新增圖片:
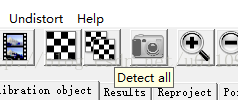
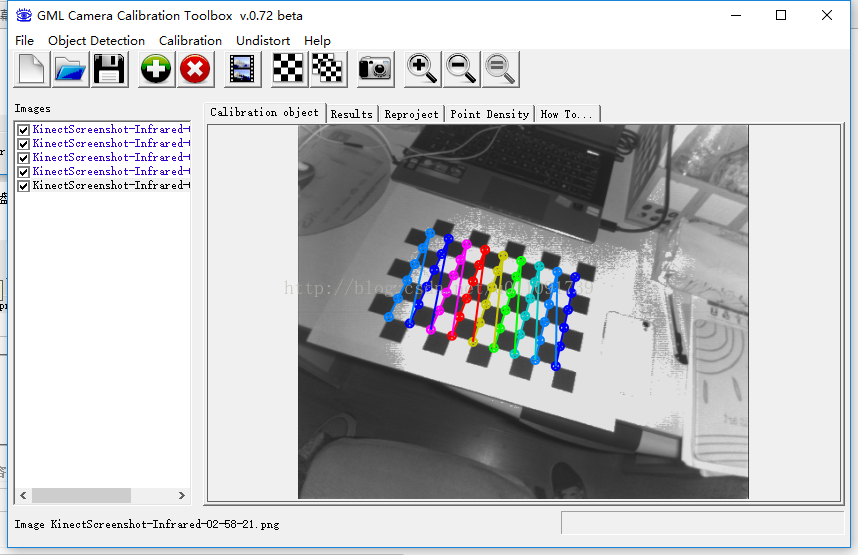
再點選Detect All檢測照片中的棋盤格:
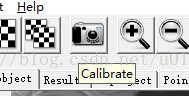
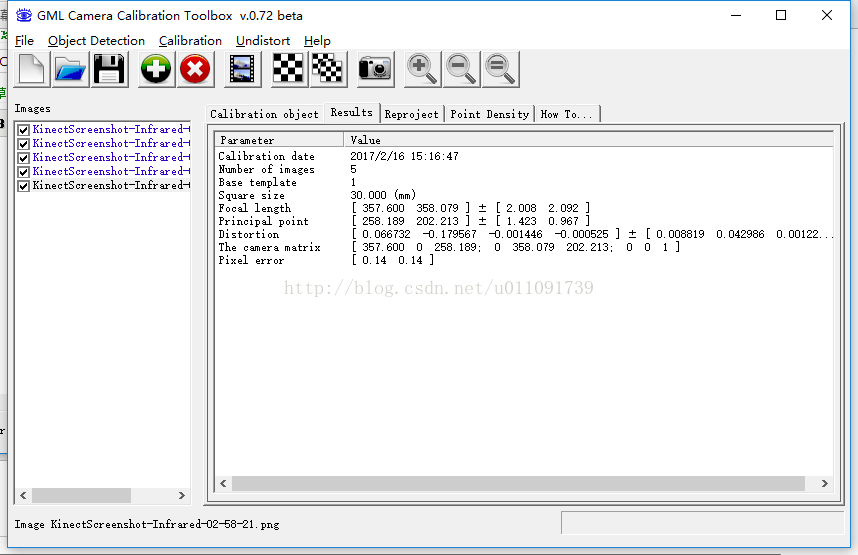
再點選Calibrate進行標定:
相關文章
- 【軟體硬體】相機標定(Camera calibration)原理、步驟
- ROS下采用camera_calibration進行雙目相機標定ROS
- Autoware 標定工具 Calibration Tool Kit 聯合標定 Robosense-16 和 ZED 相機!Zed
- Halcon單相機標定
- 使用Halcon軟體和圓形標定板進行相機標定的步驟和教程
- 自動生成相機標定軌跡
- 機器人工具座標系標定原理機器人
- 高速攝影機輔助的相機方位線上標定
- CocoStuff—基於Deeplab訓練資料的標定工具【三、標註工具的使用】
- 相機camera針孔模型與畸變矯正模型
- Dreamweaver使用img標籤定義影像高寬的教程
- 使用GML的八方向自動尋路
- 尼康相機控制軟體:Nikon Camera Control Pro 2 for macMac
- Windows 服務設定工具 WinSW 使用教程Windows
- MTK Camera相關的Makefile Option詳解
- Android多媒體之Camera的相關操作Android
- ReelSteady Go for mac(GoPro相機防抖穩定處理工具)GoMac
- 幾何校準 和 ros環境下標定Balser相機ROS
- 開源相機管理庫Aravis例程學習(六)——camera-features
- 開源相機管理庫Aravis例程學習(五)——camera-apiAPI
- Camera開發系列之二 相機資料回撥處理
- 線上標定新思路!SST-Calib:最新Camera-Lidar時空同步標定演算法(ITSC 2022)演算法
- OpenCV開發筆記(七十七):相機標定(二):透過棋盤標定計算相機內參矩陣矯正畸變攝像頭影像OpenCV筆記矩陣
- python相關工具使用Python
- kalibr標定realsenseD435i --多相機標定
- Android多媒體之Camera2的相關操作Android
- fedora系統怎麼設定滑鼠指標大小?fedora滑鼠指標設定大小的教程指標
- camera開發系列之三 相機資料採集硬編碼h264
- 使用思維導圖工具MindManager幫助實現目標設定
- Camera Raw15 for mac(PS Raw增效工具)Mac
- Nikon Camera Control Pro 2 for Mac(相機遠端控制軟體) v2.33.1啟用版Mac
- [譯] 同時使用多的相機流
- basler工業相機引數設定
- 【Linux工具】-yum/gdb使用教程!Linux
- packETH發包工具使用教程
- 關於soapUi工具的安裝使用教程UI
- ps/lr如何為一個型號相機的raw使用其他相機的預設
- Android Camera 系列(二)控制CameraAndroid
- ftp工具,ftp工具怎麼使用,如何操作?使用教程圖解。FTP圖解