20145216 20145330 《資訊保安系統設計基礎》 實驗四 模組方式驅動實驗
實驗報告封面
實驗步驟
1、閱讀和理解原始碼
進入/arm2410cl/exp/drivers/01_demo,使用vi 編輯器或其他編輯器閱讀理解原始碼。
2、實驗開始前配置環境變數

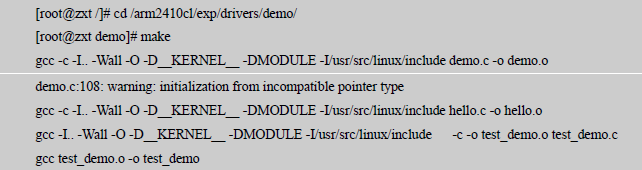
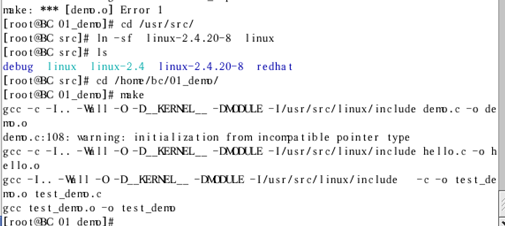
3、編譯驅動模組及測試程式上面介紹了在 Makefile 中有兩種編譯方法,可以在本機上使用gcc 也可以使用交叉編譯器進行編譯,這裡我們只介紹用交叉編譯器進行編譯的結果。
4、測試驅動程式如果使用 gcc 編譯的話,需要通過下面的命令來建立裝置節點,如果使用交叉編譯器的話,不需要建立裝置節點。

首先要插入驅動模組demo.o,然後可以用lsmod 命令來檢視模組是否已經被插入,在不使用該模組的時候還可以用rmmod 命令來將模組解除安裝。

根據上述命令輸入:
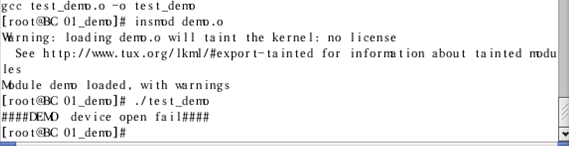
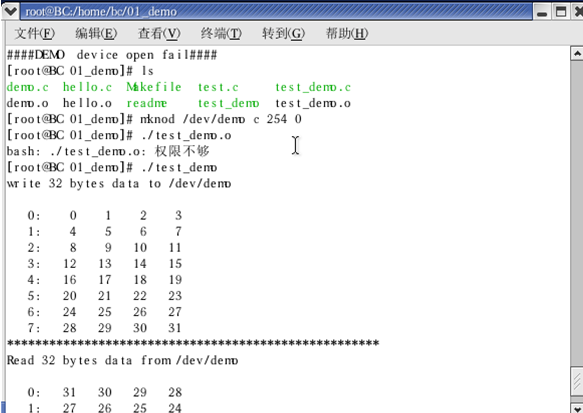
下面使用測試程式來進行測試:./test_demo
直接執行出現請求開啟失敗的提示,經過多次探索問題解決執行成功
問題與解決
1、問題:忘記配置環境變數,需要將實驗一armv4l資料夾要考到bc中
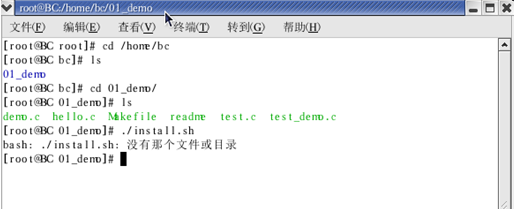
- 解決方法:將armv4l資料夾拷貝到bc中再次輸入相關命令
輸入命令./install.sb

2、問題:交叉編譯器進行編譯第一次輸入命令出現錯誤

- 解決方法:
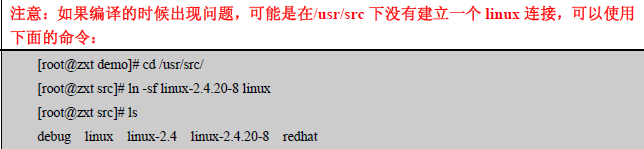
輸入命令後問題解決
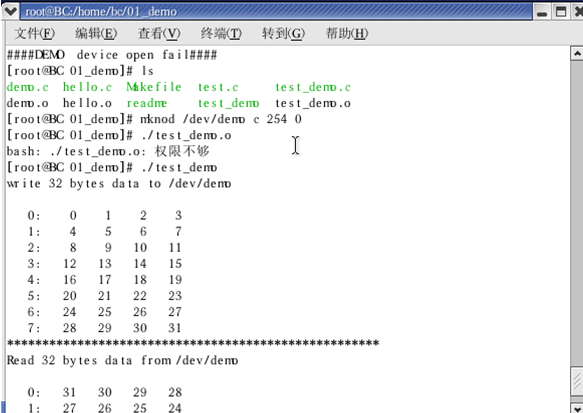
3、問題:在使用測試程式進行測試時,多次出現device open failed提示
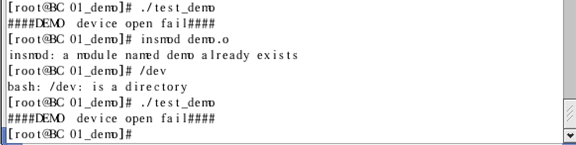
- 解決方法:懷疑是前面某一步驟漏輸入或者命令輸錯,依次再次輸入排除問題,再次輸入insmod demo.o,發現外掛已存在於是再次執行,依然失敗,排除外掛插入因素
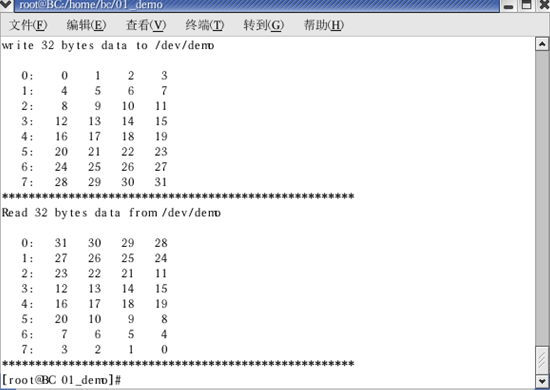
- 輸入命令#mknod /dev/demo c 254 0 ,建立裝置節點(因為第一次編譯時根據指導書指示沒有操作此步驟),進行執行發現成功。
理解原始碼
- 原始碼
#define DEVICE_NAME "demo"
static ssize_t demo_write(struct file *filp,const char * buffer, size_t count)
{
char drv_buf[];
copy_from_user(drv_buf , buffer, count);
…
}
static ssize_t demo_read(struct file *filp,char *buffer,size_t count,loff_t *ppos)
{
char drv_buf[];
copy_to_user(buffer, drv_buf,count);
….
}
static int demo_ioctl(struct inode *inode, struct file *file,unsigned int cmd, unsigned long arg)
{
}
static int demo_open(struct inode *inode, struct file *file)
{
}
static int demo_release(struct inode *inode, struct file *filp)
{
MOD_DEC_USE_COUNT;
DPRINTK("device release\n");
return 0;
}
static struct file_operations demo_fops = {
owner: THIS_MODULE,
write:demo_write,
read: demo_read,
ioctl: demo_ioctl,
open: demo_open,
release:demo_release,
};
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_demo_dir, devfs_demoraw;
#endif
static int __init demo_init(void)
{
int result;
#ifdef CONFIG_DEVFS_FS
devfs_demo_dir = devfs_mk_dir(NULL, "demo", NULL);
devfs_demoraw = devfs_register(devfs_demo_dir, "0", DEVFS_FL_DEFAULT,
demo_Major, demo_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,&demo_fops, NULL);
#else
SET_MODULE_OWNER(&demo_fops);
result = register_chrdev(demo_Major, "scullc", &demo_fops);
if (result < 0) return result;
if (demo_Major == 0) demo_Major = result; /* dynamic */
#endif
printk(DEVICE_NAME " initialized\n");
return 0;
}
static void __exit demo_exit(void)
{
unregister_chrdev(demo_major, "demo");
kfree(demo_devices);
printk(DEVICE_NAME " unloaded\n");
}
module_init(demo_init);
module_exit(demo_exit);
註釋
將驅動對映為標準介面
- static struct file_operations demo_fops = {…}完成了將驅動函式對映為標準介面。
驅動向核心註冊
- devfs_registe()和 register_chrdev()函式完成將驅動向核心註冊。
Open方法
Open 方法提供給驅動程式初始化裝置的能力,從而為以後的裝置操作做好準備,此外open操作一般還會遞增使用計數,用以防止檔案關閉前模組被解除安裝出核心。
- 遞增使用計數
- 檢查特定裝置錯誤。
- 如果裝置是首次開啟,則對其進行初始化。
- 識別次裝置號,如有必要修改 f_op 指標。
- 分配並填寫 filp->private_data 中的資料。- Release 方法
與 open 方法相反,release 方法應完成如下功能:
- 釋放由 open 分配的 filp->private_data 中的所有內容
- 在最後一次關閉操作時關閉裝置
- 使用計數減一- Read 和 和 Write 方法
ssize_t demo_write(struct file filp,const char buffer, size_t count,loff_t *ppos)
ssize_t demo_read(struct file filp, char buffer, size_t count, loff_t *ppos)
read 方法完成將資料從核心拷貝到應用程式空間,write 方法相反,將資料從應用程式空間拷貝到核心。對於者兩個方法,引數 filp 是檔案指標,count 是請求傳輸資料的長度,buffer 是使用者空間的資料緩衝區,ppos 是檔案中進行操作的偏移量,型別為 64 位數。由於使用者空間和核心空間的記憶體對映方式完全不同,所以不能使用象 memcpy 之類的函式,必須使用如下函式:
unsigned long copy_to_user (void to,const void from,unsigned long count);
unsigned long copy_from_user(void to,const void from,unsigned long count);
- ioctl方法
ioctl 方法主要用於對裝置進行讀寫之外的其他控制,比如配置裝置、進入或退出某種
操作模式,這些操作一般都無法通過 read/write 檔案操作來完成。
- 編寫中斷處理函式的注意事項:
中斷處理程式與普通C程式碼沒有太大不同,不同的是中斷處理程式在中斷期間執行,它有如下限制:
不能向使用者空間傳送或接受資料
不能執行有睡眠操作的函式
不能呼叫排程函式
- 使用/proc檔案系統
/proc 檔案系統是由程式建立的檔案系統,核心利用它向外輸出資訊。/proc 目錄下的
每一個檔案都被繫結到一個核心函式,這個函式在此檔案被讀取時,動態地生成檔案的內
容。
大多數情況下 proc 目錄下的檔案是隻讀的。使用/proc 的模組必須包 含
標頭檔案
實驗感想與體會
這次實驗我們耗費了整整兩個課時,在閱讀實驗指導書後本來覺得步驟不是很多應該能很快完成。沒想到遇到各種細小的問題,並不是一帆風順的。做實驗的魅力就在於要不斷的嘗試與探索,在這個過程中操作更加熟練知識條理更加清晰,我們這次採用了新的排除法發現查錯效率高了不少,今後會繼續努力的。