北京電子科技學院(BESTI)
實 驗 報 告
課程:資訊保安系統設計基礎 班級:1452
姓名:(按貢獻大小排名)鄢曼君 李子璇
學號:(按貢獻大小排名)20145227 20145201
成績: 指導教師:婁嘉鵬 實驗日期:2016.11.17
實驗密級:無 預習程度:已預習 實驗時間:10:00-12:30
儀器組次: 必修/選修:必修 實驗序號:04
實驗名稱:外設驅動程式設計
實驗目的與要求:
1.掌握實時系統應用和驅動程式的編寫。
2.學會以實用模組化方式來進行驅動開發與除錯。
一、實驗過程
1.首先,如同實驗一,建立實驗箱、虛擬機器Redhat、WinXP之間的連線,在linux系統中安裝arm系統,並對01_demo資料夾中的.c檔案進行交叉編譯。
2、閱讀和理解原始碼,進入/bc/01_demo,使用vi 編輯器或其他編輯器閱讀理解原始碼。
3.編譯驅動模組及測試程式
在 Makefile 中有兩種編譯方法,可以在本機上使用gcc 也可以使用交叉編譯器進行編譯,這次實驗我們組採用交叉編譯器進行編譯。之後輸入make命令,看到如下圖指令:如下圖:
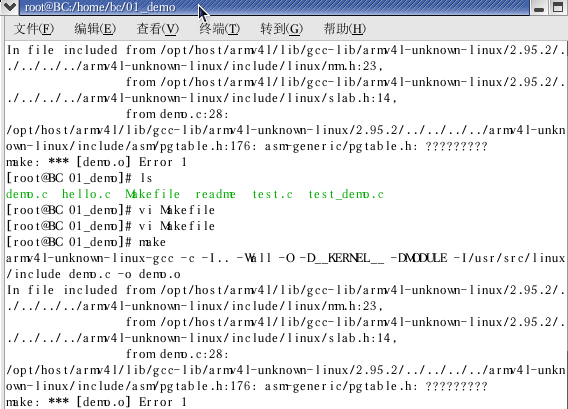
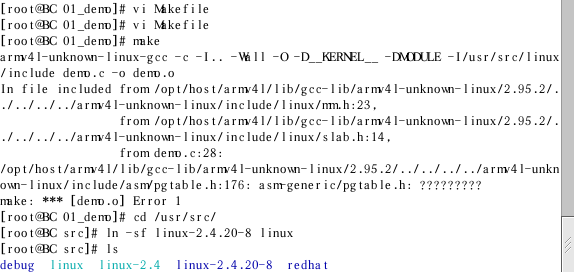
如果編譯的時候出現問題,可能是在/usr/src 下沒有建立一個linux 連線,可以使用下面的命令:
[root@BC 01_demo]# cd /usr/src/
[root@BC src]# ln -sf linux-2.4.20-8 linux
[root@BC src]# ls
4.測試驅動程式
如果使用 gcc 編譯的話,需要通過下面的命令來建立裝置節點,如果使用交叉編譯器的話,不需要建立裝置節點。
#mknod /dev/demo c 254 0
首先要插入驅動模組demo.o,然後可以用lsmod 命令來檢視模組是否已經被插入,在不使用該模組的時候還可以用rmmod 命令來將模組解除安裝。
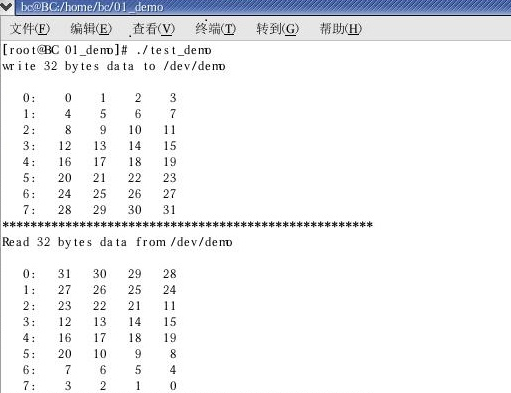
我們使用交叉編譯器,不需要建立裝置節點,下圖為成功的結果:
二、實驗過程中遇到的問題以及解決方案。
1、問題:採用交叉編譯器進行編譯時出現erro1錯誤
解決:在/usr/src 下建立一個 linux 連線,使用下面的命令:
[root@BC 01_demo]# cd /usr/src/
[root@BC src]# ln -sf linux-2.4.20-8 linux
[root@BC src]# ls
2、依然沒有解決問題,還是存在錯誤。
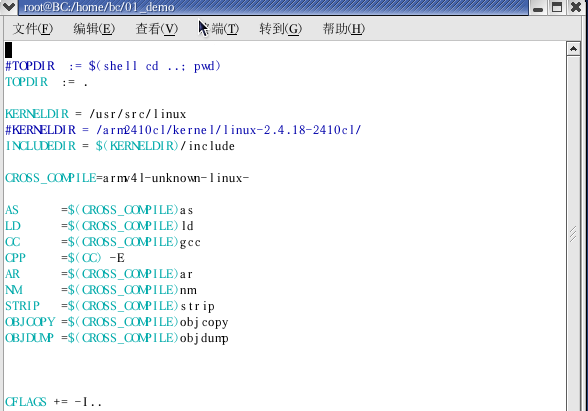
解決:進入01_demo資料夾中,對Makefilemakefile檔案進行修改,使之與指導書上一樣。
KERNELDIR = /usr/src/linux
#KERNELDIR = /arm2410cl/ kernel/linux-2.4.18-2410cl/
INCLUDEDIR = $(KERNELDIR)/include
#CROSS_COMPILE=armv41-unknown-linux-
AS =$(CROSS_COMPILE)as
LD =$(CROSS_COMPILE)ld
CC =$(CROSS_COMPILE)gcc
CPP =$(CC) -E
AR =$(CROSS_COMPILE)ar
NM =$(CROSS_COMPILE)nm
STRIP =$(CROSS_COMPILE)strip
OBJCOPY =$(CROSS_COMPILE)objcopy
OBJDUMP =$(CROSS_COMPILE)objdump
CFLAGS += -I..
CFLAGS += -Wall -O -D__KERNEL__ -DMODULE -I$(INCLUDEDIR)
TARGET = demo
OBJS = demo.o hello.o
SRC = demo.c hello.c
all: $(OBJS)
demo.o: demo.c
$(CC) -c $(CFLAGS) $^ -o $@
hello.o:hello.c
$(CC) -c $(CFLAGS) $^ -o $@
install:
install -d $(INSTALLDIR)
install -c $(TARGET).o $(INSTALLDIR)
clean:
rm -f *.o *~ core .depend
再make之後,不會出現erro。最後執行./testdemo,結果如下:
實驗程式碼分析:
demo.c:
#define DEVICE_NAME "demo"
#define demo_MAJOR 254
#define demo_MINOR 0
static int MAX_BUF_LEN=1024;
static char drv_buf[1024];
static int WRI_LENGTH=0;
/*逆序排列緩衝區資料*/
static void do_write()
{
int i;
int len = WRI_LENGTH;
char tmp;
for(i = 0; i < (len>>1); i++,len--){
tmp = drv_buf[len-1];
drv_buf[len-1] = drv_buf[i];
drv_buf[i] = tmp;
}
}
static ssize_t demo_write(struct file *filp,const char *buffer, size_t count)
{
if(count > MAX_BUF_LEN)count = MAX_BUF_LEN;
copy_from_user(drv_buf , buffer, count);
WRI_LENGTH = count;
printk("user write data to driver\n");
do_write();
return count;
}
static ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
{
if(count > MAX_BUF_LEN)
count=MAX_BUF_LEN;
copy_to_user(buffer, drv_buf,count);
printk("user read data from driver\n");
return count;
}
static int demo_ioctl(struct inode *inode, struct file *file,
unsigned int cmd, unsigned long arg)
{
printk("ioctl runing\n");
switch(cmd){
case 1:printk("runing command 1 \n");break;
case 2:printk("runing command 2 \n");break;
default:
printk("error cmd number\n");break;
}
return 0;
}
static int demo_open(struct inode *inode, struct file *file)
{
sprintf(drv_buf,"device open sucess!\n");
printk("device open sucess!\n");
return 0;
}
static int demo_release(struct inode *inode, struct file *filp)
{
MOD_DEC_USE_COUNT;
printk("device release\n");
return 0;
}
static struct file_operations demo_fops = {
owner: THIS_MODULE,
write: demo_write,
read: demo_read,
ioctl: demo_ioctl,
open: demo_open,
release: demo_release,
};
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_demo_dir, devfs_demoraw;
#endif
static int __init demo_init(void)
{
#ifdef CONFIG_DEVFS_FS
devfs_demo_dir = devfs_mk_dir(NULL, "demo", NULL);
devfs_demoraw = devfs_register(devfs_demo_dir, "0", DEVFS_FL_DEFAULT,
demo_MAJOR, demo_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,
&demo_fops, NULL);
#else
int result;
SET_MODULE_OWNER(&demo_fops);
result = register_chrdev(demo_MAJOR, "demo", &demo_fops);
if (result < 0) return result;
// if (demo_MAJOR == 0) demo_MAJOR = result; /* dynamic */
#endif
printk(DEVICE_NAME " initialized\n");
return 0;
}
static void __exit demo_exit(void)
{
unregister_chrdev(demo_MAJOR, "demo");
//kfree(demo_devices);
printk(DEVICE_NAME " unloaded\n");
}
module_init(demo_init);
module_exit(demo_exit);
(1)將驅動對映為標準介面
static struct file_operations demo_fops = {…}完成了將驅動函式對映為標準介面。
(2)驅動向核心註冊
devfs_registe()和 register_chrdev()函式完成將驅動向核心註冊。
(3)Open方法
Open方法提供給驅動程式初始化裝置的能力,從而為以後的裝置操作做好準備,此外open操作一般還會遞增使用計數,用以防止檔案關閉前模組被解除安裝出核心。
遞增使用計數
檢查特定裝置錯誤。
如果裝置是首次開啟,則對其進行初始化。
識別次裝置號,如有必要修改 f_op 指標。
分配並填寫 filp->private_data 中的資料。
(4)Release 方法
與open方法相反,release 方法應完成如下功能:
釋放由 open 分配的 filp->private_data 中的所有內容
在最後一次關閉操作時關閉裝置
使用計數減一
(5)Read和Write方法
ssize_t demo_write(struct file *filp,const char * buffer, size_t count,loff_t *ppos)
ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
read 方法完成將資料從核心拷貝到應用程式空間,write 方法相反,將資料從應用程式空間拷貝到核心。對於者兩個方法,引數 filp 是檔案指標,count 是請求傳輸資料的長度,buffer 是使用者空間的資料緩衝區,ppos 是檔案中進行操作的偏移量,型別為 64 位數。
由於使用者空間和核心空間的記憶體對映方式完全不同,所以不能使用象 memcpy 之類的函式,必須使用如下函式:
unsigned long copy_to_user (void *to,const void *from,unsigned long count);
unsigned long copy_from_user(void *to,const void *from,unsigned long count);
(6)ioctl方法
ioctl 方法主要用於對裝置進行讀寫之外的其他控制,比如配置裝置、進入或退出某種操作模式,這些操作一般都無法通過 read/write 檔案操作來完成。
實驗感想:
這次實驗對程式碼的理解是很重要的。一開始跟著教程做,遇到了很多問題,後面實驗成功了但是其實程式碼中還是有很多不懂的地方。通過對程式碼的分析以及對問題的解決,我們對這次實驗的印象更加深刻,對知識的理解也更加透徹了。