嵌入式Linux驅動筆記(十二)------通俗易懂式分析瞭解spi框架
你好!這裡是風箏的部落格,
歡迎和我一起交流。
之前講過i2c框架:通俗易懂式分析瞭解i2c框架
如果之前你看懂了,那其實spi框架也差不多。
同樣的,先上張圖:
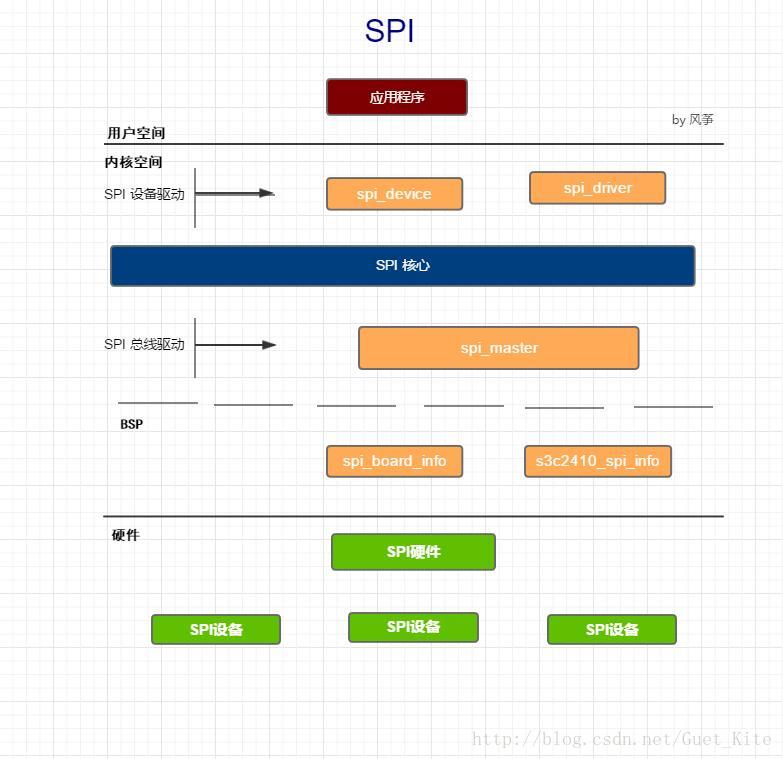
老規則,從上往下看起,以kernel4.8.17為例:
在mach-smdk2440.c檔案裡:
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_ohci,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&smdk2440_device_eth,
};沒有spi的device,我們需要自己手動新增進去:
&s3c_device_spi0,
可以看到,他和s3c_device_i2c0是類似的:
static struct resource s3c_spi0_resource[] = {
[0] = DEFINE_RES_MEM(S3C24XX_PA_SPI, SZ_32),
[1] = DEFINE_RES_IRQ(IRQ_SPI0),
};
struct platform_device s3c_device_spi0 = {
.name = "s3c2410-spi",
.id = 0,
.num_resources = ARRAY_SIZE(s3c_spi0_resource),
.resource = s3c_spi0_resource,
.dev = {
.dma_mask = &samsung_device_dma_mask,
.coherent_dma_mask = DMA_BIT_MASK(32),
}
};name為”s3c2410-spi”。
接著看spi-s3c24xx.c檔案:
static struct platform_driver s3c24xx_spi_driver = {
.probe = s3c24xx_spi_probe,
.remove = s3c24xx_spi_remove,
.driver = {
.name = "s3c2410-spi",
.pm = S3C24XX_SPI_PMOPS,
},
};
module_platform_driver(s3c24xx_spi_driver);這裡名字匹配,會呼叫probe函式:
static int s3c24xx_spi_probe(struct platform_device *pdev)
{
/*省略......*/
master = spi_alloc_master(&pdev->dev, sizeof(struct s3c24xx_spi));
if (master == NULL) {
dev_err(&pdev->dev, "No memory for spi_master\n");
return -ENOMEM;
}
hw = spi_master_get_devdata(master);
hw->master = master;
hw->pdata = pdata = dev_get_platdata(&pdev->dev);
hw->dev = &pdev->dev;
/*省略......*/
/* the spi->mode bits understood by this driver: */
master->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH;
master->num_chipselect = hw->pdata->num_cs;
master->bus_num = pdata->bus_num;
master->bits_per_word_mask = SPI_BPW_MASK(8);
/* setup the state for the bitbang driver */
hw->bitbang.master = hw->master;
hw->bitbang.setup_transfer = s3c24xx_spi_setupxfer;
hw->bitbang.chipselect = s3c24xx_spi_chipsel;
hw->bitbang.txrx_bufs = s3c24xx_spi_txrx;
hw->master->setup = s3c24xx_spi_setup;
/*省略......*/
err = devm_request_irq(&pdev->dev, hw->irq, s3c24xx_spi_irq, 0,
pdev->name, hw);
/*省略......*/
s3c24xx_spi_initialsetup(hw);
/* register our spi controller */
err = spi_bitbang_start(&hw->bitbang);
if (err) {
dev_err(&pdev->dev, "Failed to register SPI master\n");
goto err_register;
}
return 0;
}這裡就涉及到spi_master了,SPI控制器負責按照設定的物理訊號格式在主控和spi裝置之間交換資料,SPI控制器資料是如何被傳輸的,而不關心資料的內容。SPI通用介面層用spi_master結構來表示一個spi控制器。
probe裡會對master裡的各種資料和回撥函式進行填充,如:
hw->bitbang.setup_transfer:計算預分頻係數並寫入暫存器
master->num_chipselect:控制器支援的片選數量,即能支援多少個spi裝置
hw->bitbang.chipselect:對硬體的設定,禁止或使能CS訊號
hw->master->setup:設定SPI模式
以及設定中斷:s3c24xx_spi_irq
注意這一句:hw->bitbang.txrx_bufs = s3c24xx_spi_txrx;
也就是s3c24xx_spi_txrx函式,注意一下,這個我們待會講。
之後主要就是呼叫spi_bitbang_start進行register SPI master了:
int spi_bitbang_start(struct spi_bitbang *bitbang)
{
struct spi_master *master = bitbang->master;
int ret;
if (!master || !bitbang->chipselect)
return -EINVAL;
mutex_init(&bitbang->lock);
if (!master->mode_bits)
master->mode_bits = SPI_CPOL | SPI_CPHA | bitbang->flags;
if (master->transfer || master->transfer_one_message)
return -EINVAL;
master->prepare_transfer_hardware = spi_bitbang_prepare_hardware;
master->unprepare_transfer_hardware = spi_bitbang_unprepare_hardware;
master->transfer_one = spi_bitbang_transfer_one;
master->set_cs = spi_bitbang_set_cs;
if (!bitbang->txrx_bufs) {
bitbang->use_dma = 0;
bitbang->txrx_bufs = spi_bitbang_bufs;
if (!master->setup) {
if (!bitbang->setup_transfer)
bitbang->setup_transfer =
spi_bitbang_setup_transfer;
master->setup = spi_bitbang_setup;
master->cleanup = spi_bitbang_cleanup;
}
}
/* driver may get busy before register() returns, especially
* if someone registered boardinfo for devices
*/
ret = spi_register_master(spi_master_get(master));
if (ret)
spi_master_put(master);
return 0;
}這裡就是開始對master進行設定了:
master->prepare_transfer_hardware:在發起一個資料傳送過程前,給控制器驅動一個機會,申請或釋放某些必要的硬體資源。
master->unprepare_transfer_hardware:在發起一個資料傳送過程後,清理回撥函式。
master->setup:修改控制器的工作模式或引數
bitbang->setup_transfer:設定資料傳輸速率。
master->cleanup:SPI從裝置被釋放時,該回撥函式會被呼叫,以便釋放該從裝置所佔用的硬體資源。
等等……
這裡也要注意一個:master->transfer_one = spi_bitbang_transfer_one;
這個master->transfer_one和master->transfer_one_message很像,不要搞混了。先留意一下spi_bitbang_transfer_one這個函式。
這裡注意了,不要對master->transfer || master->transfer_one_message進行回撥函式填充!
接著呼叫spi_register_master函式:
int spi_register_master(struct spi_master *master)
{
/*省略......*/
/* convention: dynamically assigned bus IDs count down from the max */
if (master->bus_num < 0) {
/* FIXME switch to an IDR based scheme, something like
* I2C now uses, so we can't run out of "dynamic" IDs
*/
master->bus_num = atomic_dec_return(&dyn_bus_id);
dynamic = 1;
}
INIT_LIST_HEAD(&master->queue);
spin_lock_init(&master->queue_lock);
spin_lock_init(&master->bus_lock_spinlock);
mutex_init(&master->bus_lock_mutex);
mutex_init(&master->io_mutex);
master->bus_lock_flag = 0;
init_completion(&master->xfer_completion);
if (!master->max_dma_len)
master->max_dma_len = INT_MAX;
/* register the device, then userspace will see it.
* registration fails if the bus ID is in use.
*/
dev_set_name(&master->dev, "spi%u", master->bus_num);
status = device_add(&master->dev);
if (status < 0)
goto done;
dev_dbg(dev, "registered master %s%s\n", dev_name(&master->dev),
dynamic ? " (dynamic)" : "");
/* If we're using a queued driver, start the queue */
if (master->transfer)
dev_info(dev, "master is unqueued, this is deprecated\n");
else {
status = spi_master_initialize_queue(master);
if (status) {
device_del(&master->dev);
goto done;
}
}
/* add statistics */
spin_lock_init(&master->statistics.lock);
mutex_lock(&board_lock);
list_add_tail(&master->list, &spi_master_list);
list_for_each_entry(bi, &board_list, list)
spi_match_master_to_boardinfo(master, &bi->board_info);
mutex_unlock(&board_lock);
/* Register devices from the device tree and ACPI */
of_register_spi_devices(master);
acpi_register_spi_devices(master);
done:
return status;
}這算是一個比較關鍵的函式,裡面:
master->bus_num,代表的是掛在哪條匯流排上,spi0或者spi1之類的。
接著初始化master->queue,這裡,queue,佇列!為什麼會有佇列呢?
為了解決多個不同的SPI裝置共享SPI控制器而帶來的訪問衝突,spi_bitbang使用核心提供的工作佇列(workqueue)。workqueue是Linux核心中定義的一種回撥處理方式。採用這種方式需要傳輸資料時,不直接完成資料的傳輸,而是將要傳輸的工作分裝成相應的訊息(spi_message),傳送給對應的workqueue,由與workqueue關聯的核心守護執行緒(daemon)負責具體的執行。由於workqueue會將收到的訊息按時間先後順序排列,這樣就是對裝置的訪問嚴格序列化,解決了衝突。
所以SPI的通訊是通過訊息佇列機制。
接著設定名字:dev_set_name(&master->dev, “spi%u”, master->bus_num);
就是剛剛說的spi0、spi1……
然後,
if (master->transfer)
dev_info(dev, “master is unqueued, this is deprecated\n”);
else {
status = spi_master_initialize_queue(master);
if (status) {
device_del(&master->dev);
goto done;
}
}
之前說過,我們沒有對master->transfer進行填充,所以會進入spi_master_initialize_queue函式,
最後,
list_add_tail(&master->list, &spi_master_list);
list_for_each_entry(bi, &board_list, list)
spi_match_master_to_boardinfo(master, &bi->board_info);
將master->list新增到spi_master_list列表,迴圈遍歷spi裝置配置結構體,然後與spi控制的匯流排號匹配,成功則生成新spi裝置。
我們來看下spi_master_initialize_queue函式:
static int spi_master_initialize_queue(struct spi_master *master)
{
int ret;
master->transfer = spi_queued_transfer;
if (!master->transfer_one_message)
master->transfer_one_message = spi_transfer_one_message;
/* Initialize and start queue */
ret = spi_init_queue(master);
if (ret) {
dev_err(&master->dev, "problem initializing queue\n");
goto err_init_queue;
}
master->queued = true;
ret = spi_start_queue(master);
if (ret) {
dev_err(&master->dev, "problem starting queue\n");
goto err_start_queue;
}
return 0;
err_start_queue:
spi_destroy_queue(master);
err_init_queue:
return ret;
}這裡,系統就會自動幫我們填充master->transfer以及master->transfer_one_message了。
就是spi的通訊函式。從名字看,這兩個都是通訊函式,那他們兩個是什麼關係呢?別急,待會講。
然後呼叫spi_init_queue和spi_start_queue函式初始化佇列並啟動工作執行緒(spi_pump_messages函式):init_kthread_work(&master->pump_messages, spi_pump_messages)
queue_kthread_work(&master->kworker, &master->pump_messages)
.
最後,我們來看spi是怎麼讀寫的,在spi裝置驅動層提供了兩種資料傳輸方式。一種是半雙工方式,另一種就是全雙工方式。write方法提供了半雙工讀訪問,read方法提供了半雙工寫訪問。
在spi.h檔案裡,以寫函式為例:
static inline int
spi_write(struct spi_device *spi, const void *buf, size_t len)
{
struct spi_transfer t = {
.tx_buf = buf,
.len = len,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spi_sync(spi, &m);
}初始化spi_message,然後把spi_transfer連結到spi_message尾部。最後呼叫spi_sync函式,呼叫過程:
spi_sync
__spi_sync(spi, message);
__spi_queued_transfer(spi, message, false);//這個就是master->transfer
__spi_pump_messages(master, false);
wait_for_completion(&done);記得之前說的master->transfer和master->transfer_one_message的關係嗎?
先進入__spi_queued_transfer函式:
static int __spi_queued_transfer(struct spi_device *spi,
struct spi_message *msg,
bool need_pump)
{
struct spi_master *master = spi->master;
unsigned long flags;
spin_lock_irqsave(&master->queue_lock, flags);
if (!master->running) {
spin_unlock_irqrestore(&master->queue_lock, flags);
return -ESHUTDOWN;
}
msg->actual_length = 0;
msg->status = -EINPROGRESS;
list_add_tail(&msg->queue, &master->queue);
if (!master->busy && need_pump)
queue_kthread_work(&master->kworker, &master->pump_messages);
spin_unlock_irqrestore(&master->queue_lock, flags);
return 0;
}這裡,master->transfer裡,先將攜帶資料的結構體spi_message掛到master->queue上。每一次資料傳輸都將要傳輸的資料包裝成結構體spi_message傳遞。
接著將該傳輸任務新增到工作佇列頭master->kworker,在某個合適的時間, master->pump_messages將被排程執行,也就是spi_pump_messages函式將被呼叫:
所以他並不涉及到真正的資料傳輸。
看下spi_pump_messages函式:
static void spi_pump_messages(struct kthread_work *work)
{
struct spi_master *master =
container_of(work, struct spi_master, pump_messages);
__spi_pump_messages(master, true);
}再看__spi_pump_messages函式,裡面有一句:
ret = master->transfer_one_message(master, master->cur_msg);
if (ret) {
dev_err(&master->dev,
"failed to transfer one message from queue\n");
goto out;
}這裡就會呼叫到master->transfer_one_message了,進行資料傳輸。
最後就會wait_for_completion阻塞等待傳輸完成了。
那他到底是怎麼傳輸的呢?看下master->transfer_one_message函式:
static int spi_transfer_one_message(struct spi_master *master,
struct spi_message *msg)
{
struct spi_transfer *xfer;
bool keep_cs = false;
int ret = 0;
unsigned long long ms = 1;
struct spi_statistics *statm = &master->statistics;
struct spi_statistics *stats = &msg->spi->statistics;
spi_set_cs(msg->spi, true);//spi片選啟用
SPI_STATISTICS_INCREMENT_FIELD(statm, messages);
SPI_STATISTICS_INCREMENT_FIELD(stats, messages);
list_for_each_entry(xfer, &msg->transfers, transfer_list) {//從spi_message結構的transfers連結串列中獲取spi_transfer結構
trace_spi_transfer_start(msg, xfer);
spi_statistics_add_transfer_stats(statm, xfer, master);
spi_statistics_add_transfer_stats(stats, xfer, master);
if (xfer->tx_buf || xfer->rx_buf) {
reinit_completion(&master->xfer_completion);
ret = master->transfer_one(master, msg->spi, xfer);
/*部分省略......*/
if (ret > 0) {
ret = 0;
ms = 8LL * 1000LL * xfer->len;
do_div(ms, xfer->speed_hz);
ms += ms + 100; /* some tolerance */
if (ms > UINT_MAX)
ms = UINT_MAX;
ms = wait_for_completion_timeout(&master->xfer_completion,
msecs_to_jiffies(ms));
}
/*部分省略......*/
} else {
if (xfer->len)
dev_err(&msg->spi->dev,
"Bufferless transfer has length %u\n",
xfer->len);
}
trace_spi_transfer_stop(msg, xfer);
if (msg->status != -EINPROGRESS)
goto out;
if (xfer->delay_usecs)
udelay(xfer->delay_usecs);
if (xfer->cs_change) {
if (list_is_last(&xfer->transfer_list,
&msg->transfers)) {
keep_cs = true;//不用重新片選,繼續下一個message的傳輸
} else {
spi_set_cs(msg->spi, false);
udelay(10);
spi_set_cs(msg->spi, true);
}
}
msg->actual_length += xfer->len;
}
out:
if (ret != 0 || !keep_cs)
spi_set_cs(msg->spi, false);
if (msg->status == -EINPROGRESS)
msg->status = ret;//所用spi_message傳輸完畢
if (msg->status && master->handle_err)
master->handle_err(master, msg);
spi_res_release(master, msg);
spi_finalize_current_message(master);
return ret;
}這裡可以看出呼叫了master->transfer_one(master, msg->spi, xfer)以及spi_finalize_current_message(master);
master->transfer_one就是我們之前說的,spi_finalize_current_message函式裡會呼叫mesg->complete,使得wait_for_completion不需要再阻塞等待了。
我們繼續看下master->transfer_one函式:
static int spi_bitbang_transfer_one(struct spi_master *master,
struct spi_device *spi,
struct spi_transfer *transfer)
{
struct spi_bitbang *bitbang = spi_master_get_devdata(master);
int status = 0;
if (bitbang->setup_transfer) {
status = bitbang->setup_transfer(spi, transfer);
if (status < 0)
goto out;
}
if (transfer->len)
status = bitbang->txrx_bufs(spi, transfer);
if (status == transfer->len)
status = 0;
else if (status >= 0)
status = -EREMOTEIO;
out:
spi_finalize_current_transfer(master);
return status;
}函式裡面,一開始就呼叫bitbang->setup_transfer對SPI進行設定,然後就會呼叫bitbang->txrx_bufs了,記得之前說過的嗎?
static int s3c24xx_spi_txrx(struct spi_device *spi, struct spi_transfer *t)
{
struct s3c24xx_spi *hw = to_hw(spi);
hw->tx = t->tx_buf;
hw->rx = t->rx_buf;
hw->len = t->len;
hw->count = 0;
init_completion(&hw->done);
hw->fiq_inuse = 0;
if (s3c24xx_spi_usefiq(hw) && t->len >= 3)
s3c24xx_spi_tryfiq(hw);
/* send the first byte */
writeb(hw_txbyte(hw, 0), hw->regs + S3C2410_SPTDAT);
wait_for_completion(&hw->done);
return hw->count;
}這裡就是SPI的傳輸了,看註釋,這裡雖然只傳送第一位元組,但是中斷裡會傳送完其它的位元組(並接收資料), 直到所有的資料傳送完畢且所要接收的資料接收完畢(首要)才返回。
static irqreturn_t s3c24xx_spi_irq(int irq, void *dev)
{
struct s3c24xx_spi *hw = dev;
unsigned int spsta = readb(hw->regs + S3C2410_SPSTA);
unsigned int count = hw->count;
if (spsta & S3C2410_SPSTA_DCOL) {
dev_dbg(hw->dev, "data-collision\n");//檢測衝突
complete(&hw->done);
goto irq_done;
}
if (!(spsta & S3C2410_SPSTA_READY)) {
dev_dbg(hw->dev, "spi not ready for tx?\n");//裝置忙
complete(&hw->done);
goto irq_done;
}
if (!s3c24xx_spi_usingfiq(hw)) {
hw->count++;
if (hw->rx)
hw->rx[count] = readb(hw->regs + S3C2410_SPRDAT);//接收資料
count++;
if (count < hw->len)
writeb(hw_txbyte(hw, count), hw->regs + S3C2410_SPTDAT);//傳送需要的資料或者傳送0
else
complete(&hw->done);//傳送接收完畢
} else {
hw->count = hw->len;
hw->fiq_inuse = 0;
if (hw->rx)
hw->rx[hw->len-1] = readb(hw->regs + S3C2410_SPRDAT);
complete(&hw->done);
}
irq_done:
return IRQ_HANDLED;
}
所以說,spi_sync函式是發起一個同步傳輸的阻塞API,它會通過master->transfer把spi_message結構掛在spi_master的queue欄位下,然後啟動專門為spi傳輸準備的核心工作執行緒spi_pump_messages,把該spi_message從佇列中移除,然後呼叫master->prepare_transfer_hardware回撥來讓控制器驅動準備必要的硬體資源,最後 master->transfer_one_message來實際處理message的傳輸工作,然後等待傳輸的完成後呼叫mesg->complete,表明傳輸完成,以通知協議驅動程式準備下一幀資料,wait_for_completion不需要再等待了。
最後,還有其他的API傳輸函式供我們使用:
int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx); —- 先寫後讀。
static inline ssize_t spi_w8r8(struct spi_device *spi, u8 cmd) —- 寫8位,然後讀8位。
static inline ssize_t spi_w8r16(struct spi_device *spi, u8 cmd) —- 寫8位,然後讀16位。
參考:https://blog.csdn.net/droidphone/article/details/24663659
下一章講2440怎麼移植使用SPI驅動:spi裝置之RFID-rc522驅動
相關文章
- 嵌入式Linux驅動筆記(十)------通俗易懂式分析瞭解i2c框架Linux筆記框架
- 嵌入式Linux驅動筆記(十三)------spi裝置之RFID-rc522驅動Linux筆記
- 嵌入式Linux驅動筆記(十七)------詳解V4L2框架(UVC驅動)Linux筆記框架
- 嵌入式Linux驅動筆記(十四)------詳解clock時鐘(CCF)框架及clk_get函式Linux筆記框架函式
- SPI驅動框架一框架
- 嵌入式Linux驅動筆記(十六)------裝置驅動模型(kobject、kset、ktype)Linux筆記模型Object
- 嵌入式Linux驅動筆記(十八)------淺析V4L2框架之ioctlLinux筆記框架
- 嵌入式Linux驅動學習筆記(十六)------裝置驅動模型(kobject、kset、ktype)Linux筆記模型Object
- 嵌入式Linux驅動筆記(十一)------i2c裝置之mpu6050驅動Linux筆記
- 嵌入式Linux驅動筆記(九)------dts裝置樹在2440使用Linux筆記
- SPI轉can晶片CSM300詳解以及Linux驅動移植除錯筆記晶片Linux除錯筆記
- 嵌入式Linux驅動筆記(十五)------編譯使用tslib支援LCD觸控式螢幕Linux筆記編譯
- SPI驅動示例
- 嵌入式Linux驅動學習筆記(十五)------編譯使用tslib支援LCD觸控式螢幕Linux筆記編譯
- 嵌入式Linux中的LED驅動控制(續)Linux
- Linux裝置驅動探究第1天----spi驅動(1)Linux
- 嵌入式Linux中platform平臺裝置模型的框架(實現LED驅動)LinuxPlatform模型框架
- Linux晶片驅動之SPI ControllerLinux晶片Controller
- 【原創】Linux PCI驅動框架分析(一)Linux框架
- 【原創】Linux PCI驅動框架分析(二)Linux框架
- 框架-SPI四種模式+通用裝置驅動實現框架模式
- 嵌入式Linux中的LED驅動控制(基於misc)Linux
- 嵌入式筆記5.1 定時器詳解筆記定時器
- ArmSoM系列板卡 嵌入式Linux驅動開發實戰指南 之 字元裝置驅動Linux字元
- 向嵌入式Linux移植實時裝置驅動程式(轉)Linux
- 嵌入式Linux中的LED驅動控制(裝置樹方式)Linux
- 嵌入式系統基礎知識:瞭解嵌入式系統
- 十二、Spring Boot 嵌入式 Servlet 容器啟動原理Spring BootServlet
- 嵌入式Linux下3G無線上網路卡的驅動Linux
- 嵌入式Linux中的LED驅動控制(裝置樹方式)(續)Linux
- 筆記:瞭解Elasticsearch筆記Elasticsearch
- 【Linux SPI】RFID RC522 裝置驅動Linux
- 痞子衡嵌入式:瑞薩RA系列FSP韌體庫分析之外設驅動
- 一個嵌入式Linux系統的鍵盤驅動實現(轉)Linux
- 嵌入式之Makefile學習筆記筆記
- 嵌入式之uboot原始碼分析-啟動第二階段學習筆記(上篇)boot原始碼筆記
- 嵌入式Linux中的LED驅動控制(使用多個次裝置號)Linux
- ES 筆記三十二:文件分散式儲存筆記分散式